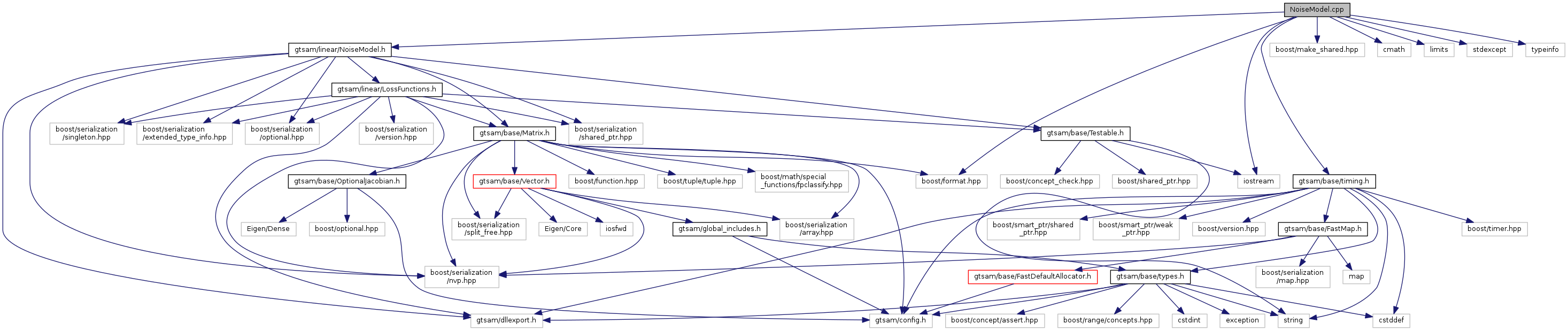
#include <gtsam/linear/NoiseModel.h>#include <gtsam/base/timing.h>#include <boost/format.hpp>#include <boost/make_shared.hpp>#include <cmath>#include <iostream>#include <limits>#include <stdexcept>#include <typeinfo>
Include dependency graph for NoiseModel.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::noiseModel | |
| All noise models live in the noiseModel namespace. | |
| gtsam::noiseModel::internal | |
Functions | |
| template<typename VECTOR > | |
| boost::optional< size_t > | gtsam::noiseModel::check_if_constraint (VECTOR a, const Vector &invsigmas, size_t m) |
| boost::optional< Vector > | gtsam::noiseModel::checkIfDiagonal (const Matrix M) |
| static void | gtsam::noiseModel::internal::fix (const Vector &sigmas, Vector &precisions, Vector &invsigmas) |
| template<class MATRIX > | |
| void | gtsam::noiseModel::updateAb (MATRIX &Ab, int j, const Vector &a, const Vector &rd) |
Detailed Description
- Date
- Jan 13, 2010
Definition in file NoiseModel.cpp.