Demonstration of the concurrent filtering and smoothing architecture using a planar robot example and multiple odometry-like sensors. More...
#include <gtsam_unstable/nonlinear/ConcurrentBatchFilter.h>#include <gtsam_unstable/nonlinear/ConcurrentBatchSmoother.h>#include <gtsam_unstable/nonlinear/BatchFixedLagSmoother.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/inference/Key.h>#include <gtsam/geometry/Pose2.h>#include <iomanip>
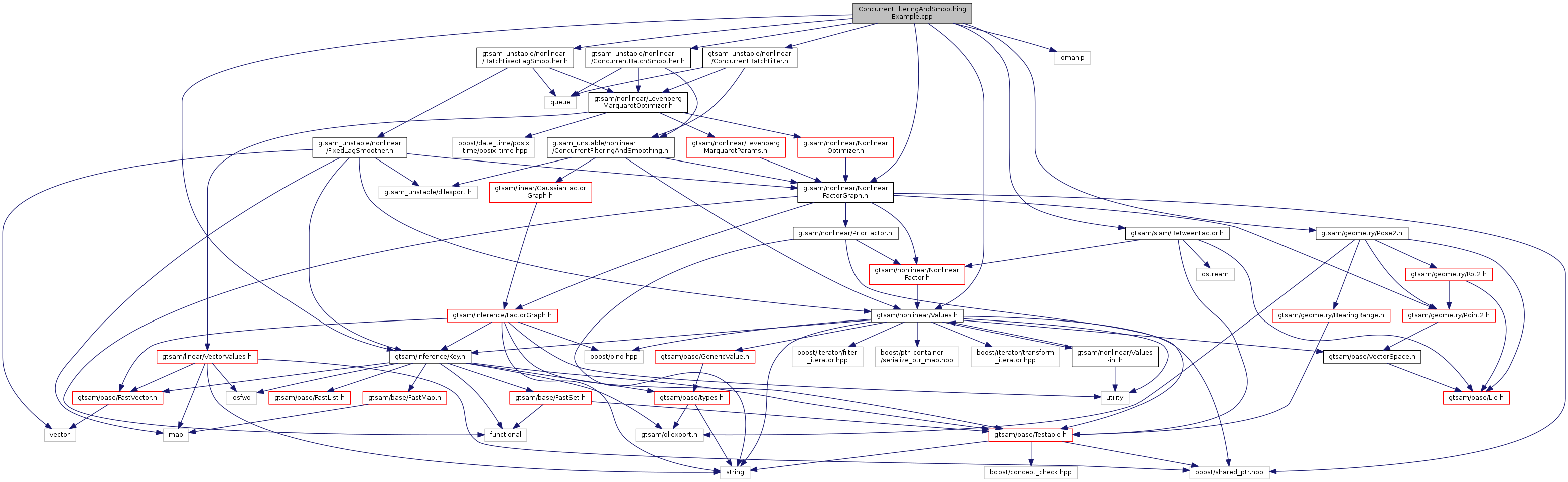
Include dependency graph for ConcurrentFilteringAndSmoothingExample.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Demonstration of the concurrent filtering and smoothing architecture using a planar robot example and multiple odometry-like sensors.
Definition in file ConcurrentFilteringAndSmoothingExample.cpp.
Function Documentation
Definition at line 62 of file ConcurrentFilteringAndSmoothingExample.cpp.