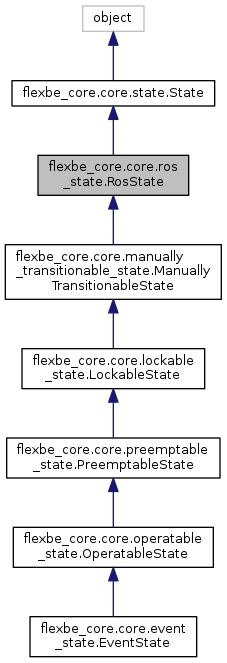
Inheritance diagram for flexbe_core.core.ros_state.RosState:
Public Member Functions | |
| def | __init__ (self, args, kwargs) |
| def | is_breakpoint (self) |
| def | set_rate (self, rate) |
| def | sleep (self) |
| def | sleep_duration (self) |
 Public Member Functions inherited from flexbe_core.core.state.State Public Member Functions inherited from flexbe_core.core.state.State | |
| def | __init__ (self, args, kwargs) |
| def | execute (self, userdata) |
| def | input_keys (self) |
| def | name (self) |
| def | outcomes (self) |
| def | output_keys (self) |
| def | parent (self) |
| def | path (self) |
| def | set_name (self, value) |
| def | set_parent (self, value) |
| def | sleep (self) |
| def | sleep_duration (self) |
Private Member Functions | |
| def | _disable_ros_control (self) |
| def | _enable_ros_control (self) |
Private Attributes | |
| _is_controlled | |
| _pub | |
| _rate | |
| _sub | |
Detailed Description
A state to interface with ROS.
Definition at line 8 of file ros_state.py.
Constructor & Destructor Documentation
| def flexbe_core.core.ros_state.RosState.__init__ | ( | self, | |
| args, | |||
| kwargs | |||
| ) |
Definition at line 13 of file ros_state.py.
Member Function Documentation
|
private |
Definition at line 44 of file ros_state.py.
|
private |
Definition at line 41 of file ros_state.py.
| def flexbe_core.core.ros_state.RosState.is_breakpoint | ( | self | ) |
Definition at line 48 of file ros_state.py.
| def flexbe_core.core.ros_state.RosState.set_rate | ( | self, | |
| rate | |||
| ) |
Set the execution rate of this state,
i.e., the rate with which the execute method is being called.
Note: The rate is best-effort,
a rospy.Rate does not guarantee real-time properties.
@type label: float
@param label: The desired rate in Hz.
Definition at line 28 of file ros_state.py.
| def flexbe_core.core.ros_state.RosState.sleep | ( | self | ) |
Definition at line 21 of file ros_state.py.
| def flexbe_core.core.ros_state.RosState.sleep_duration | ( | self | ) |
Definition at line 25 of file ros_state.py.
Member Data Documentation
|
private |
Definition at line 16 of file ros_state.py.
|
private |
Definition at line 18 of file ros_state.py.
|
private |
Definition at line 15 of file ros_state.py.
|
private |
Definition at line 19 of file ros_state.py.
The documentation for this class was generated from the following file: