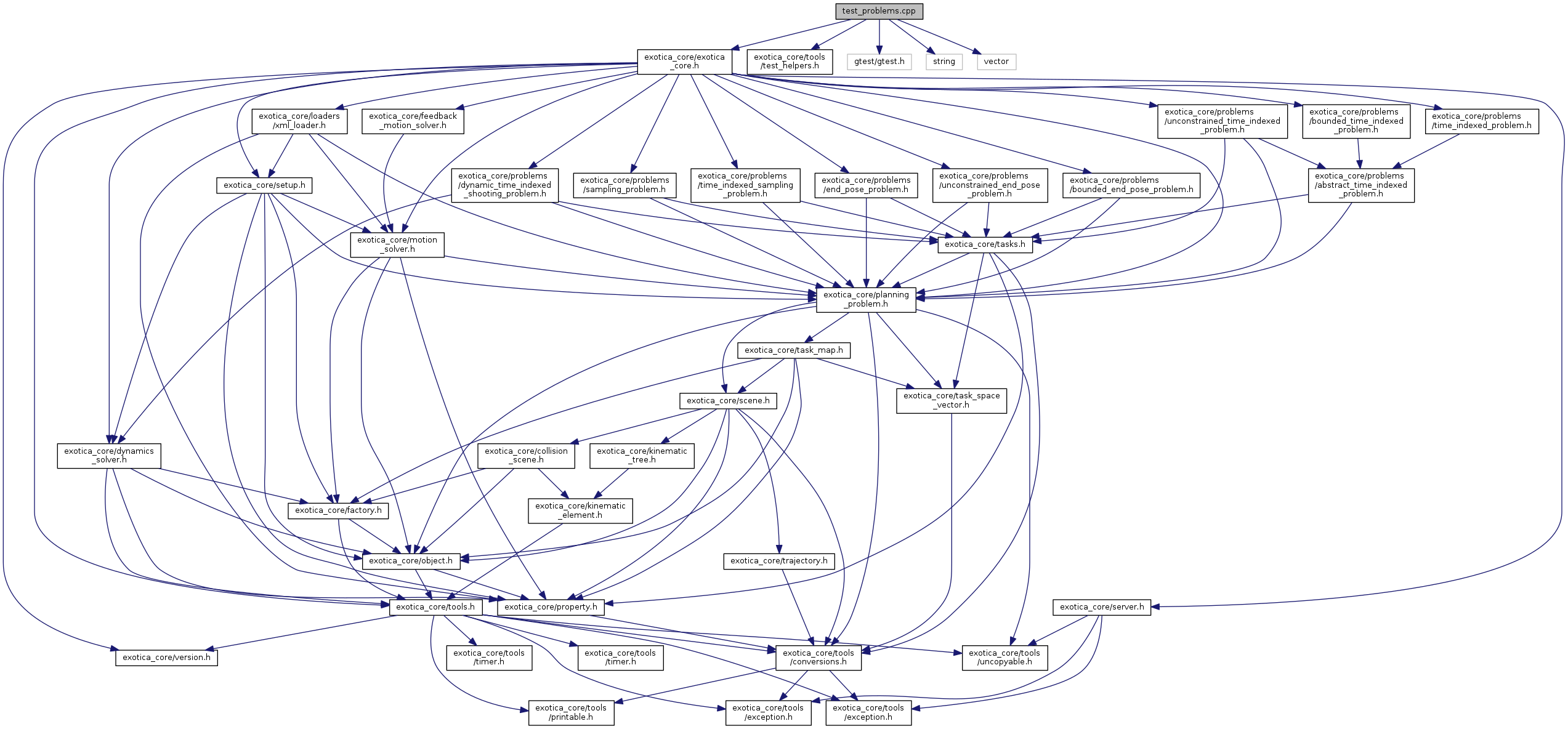
#include <exotica_core/exotica_core.h>
#include <exotica_core/tools/test_helpers.h>
#include <gtest/gtest.h>
#include <string>
#include <vector>
Go to the source code of this file.
|
| template<class T > |
| std::shared_ptr< T > | CreateProblem (const std::string &name, int derivative) |
| |
| int | main (int argc, char **argv) |
| |
| | TEST (ExoticaProblems, UnconstrainedEndPoseProblem) |
| |
| | TEST (ExoticaProblems, BoundedEndPoseProblem) |
| |
| | TEST (ExoticaProblems, EndPoseProblem) |
| |
| | TEST (ExoticaProblems, UnconstrainedTimeIndexedProblem) |
| |
| | TEST (ExoticaProblems, BoundedTimeIndexedProblem) |
| |
| | TEST (ExoticaProblems, TimeIndexedProblem) |
| |
| | TEST (ExoticaProblems, SamplingProblem) |
| |
| | TEST (ExoticaProblems, TimeIndexedSamplingProblem) |
| |
| template<class T > |
| void | testHessianEndPose (std::shared_ptr< T > problem, EndPoseTask &task, double eps=1e-4, double h=1e-5) |
| |
| template<class T > |
| void | testHessianTimeIndexed (std::shared_ptr< T > problem, TimeIndexedTask &task, int t, double eps=1e-4, double h=1e-5) |
| |
| template<class T > |
| void | testJacobianEndPose (std::shared_ptr< T > problem, EndPoseTask &task, double eps=1e-4, double h=1e-5) |
| |
| template<class T > |
| void | testJacobianTimeIndexed (std::shared_ptr< T > problem, TimeIndexedTask &task, int t, double eps=1e-4, double h=1e-5) |
| |
| #define CREATE_PROBLEM |
( |
|
X, |
|
|
|
I |
|
) |
| std::shared_ptr<X> problem = CreateProblem<X>(#X, I); |
template<class T >
| std::shared_ptr<T> CreateProblem |
( |
const std::string & |
name, |
|
|
int |
derivative |
|
) |
| |
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
template<class T >
| void testHessianEndPose |
( |
std::shared_ptr< T > |
problem, |
|
|
EndPoseTask & |
task, |
|
|
double |
eps = 1e-4, |
|
|
double |
h = 1e-5 |
|
) |
| |
template<class T >
| void testHessianTimeIndexed |
( |
std::shared_ptr< T > |
problem, |
|
|
TimeIndexedTask & |
task, |
|
|
int |
t, |
|
|
double |
eps = 1e-4, |
|
|
double |
h = 1e-5 |
|
) |
| |
template<class T >
| void testJacobianEndPose |
( |
std::shared_ptr< T > |
problem, |
|
|
EndPoseTask & |
task, |
|
|
double |
eps = 1e-4, |
|
|
double |
h = 1e-5 |
|
) |
| |
template<class T >
| void testJacobianTimeIndexed |
( |
std::shared_ptr< T > |
problem, |
|
|
TimeIndexedTask & |
task, |
|
|
int |
t, |
|
|
double |
eps = 1e-4, |
|
|
double |
h = 1e-5 |
|
) |
| |