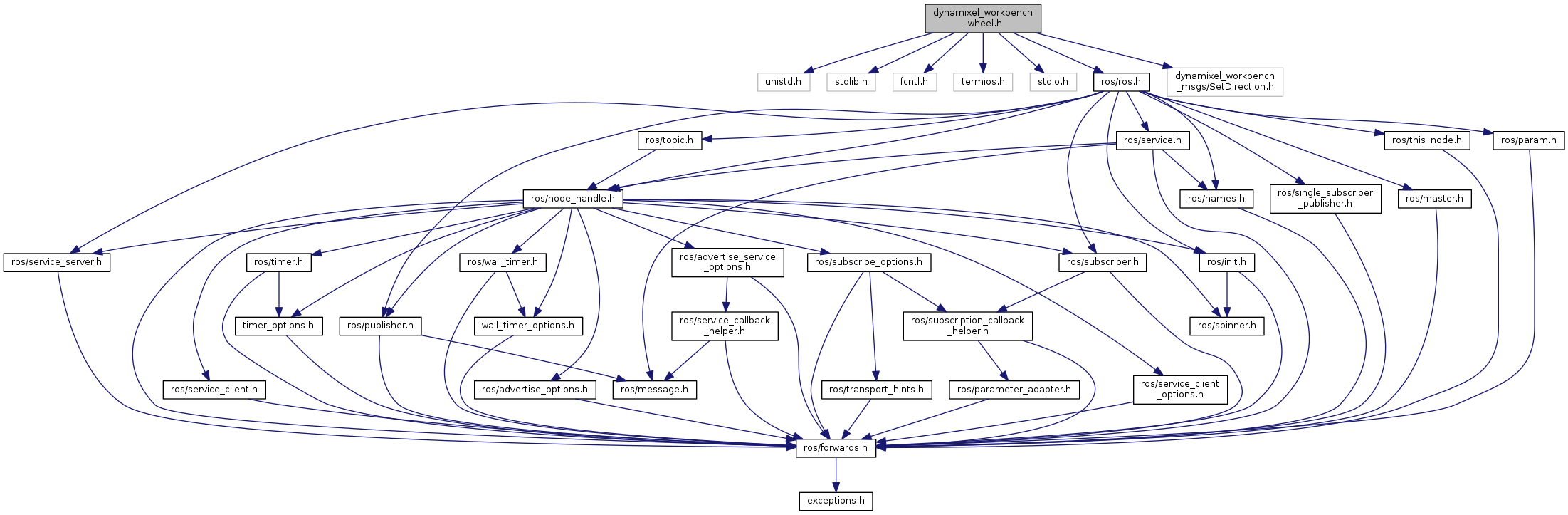
#include <unistd.h>#include <stdlib.h>#include <fcntl.h>#include <termios.h>#include <stdio.h>#include <ros/ros.h>#include <dynamixel_workbench_msgs/SetDirection.h>
Include dependency graph for dynamixel_workbench_wheel.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamixel_workbench_wheel::DynamixelWorkbenchWheel |
Namespaces | |
| dynamixel_workbench_wheel | |
Macros | |
| #define | BACKWARD 0x78 |
| #define | ESC_ASCII_VALUE 0x1b |
| #define | FORWARD 0x77 |
| #define | LEFT 0x61 |
| #define | RIGHT 0x64 |
| #define | STOPS 0x73 |
Macro Definition Documentation
| #define BACKWARD 0x78 |
Definition at line 47 of file dynamixel_workbench_wheel.h.
| #define ESC_ASCII_VALUE 0x1b |
Definition at line 45 of file dynamixel_workbench_wheel.h.
| #define FORWARD 0x77 |
Definition at line 46 of file dynamixel_workbench_wheel.h.
| #define LEFT 0x61 |
Definition at line 48 of file dynamixel_workbench_wheel.h.
| #define RIGHT 0x64 |
Definition at line 49 of file dynamixel_workbench_wheel.h.
| #define STOPS 0x73 |
Definition at line 50 of file dynamixel_workbench_wheel.h.