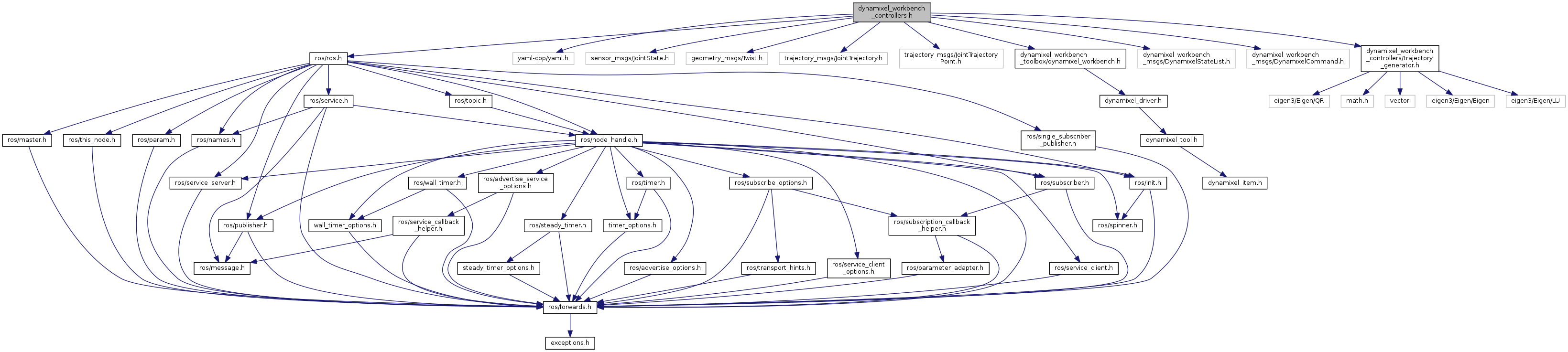
#include <ros/ros.h>#include <yaml-cpp/yaml.h>#include <sensor_msgs/JointState.h>#include <geometry_msgs/Twist.h>#include <trajectory_msgs/JointTrajectory.h>#include <trajectory_msgs/JointTrajectoryPoint.h>#include <dynamixel_workbench_toolbox/dynamixel_workbench.h>#include <dynamixel_workbench_msgs/DynamixelStateList.h>#include <dynamixel_workbench_msgs/DynamixelCommand.h>#include <dynamixel_workbench_controllers/trajectory_generator.h>
Include dependency graph for dynamixel_workbench_controllers.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | DynamixelController |
| struct | ItemValue |
Macros | |
| #define | SYNC_READ_HANDLER_FOR_PRESENT_POSITION_VELOCITY_CURRENT 0 |
| #define | SYNC_WRITE_HANDLER_FOR_GOAL_POSITION 0 |
| #define | SYNC_WRITE_HANDLER_FOR_GOAL_VELOCITY 1 |
Macro Definition Documentation
| #define SYNC_READ_HANDLER_FOR_PRESENT_POSITION_VELOCITY_CURRENT 0 |
Definition at line 42 of file dynamixel_workbench_controllers.h.
| #define SYNC_WRITE_HANDLER_FOR_GOAL_POSITION 0 |
Definition at line 38 of file dynamixel_workbench_controllers.h.
| #define SYNC_WRITE_HANDLER_FOR_GOAL_VELOCITY 1 |
Definition at line 39 of file dynamixel_workbench_controllers.h.