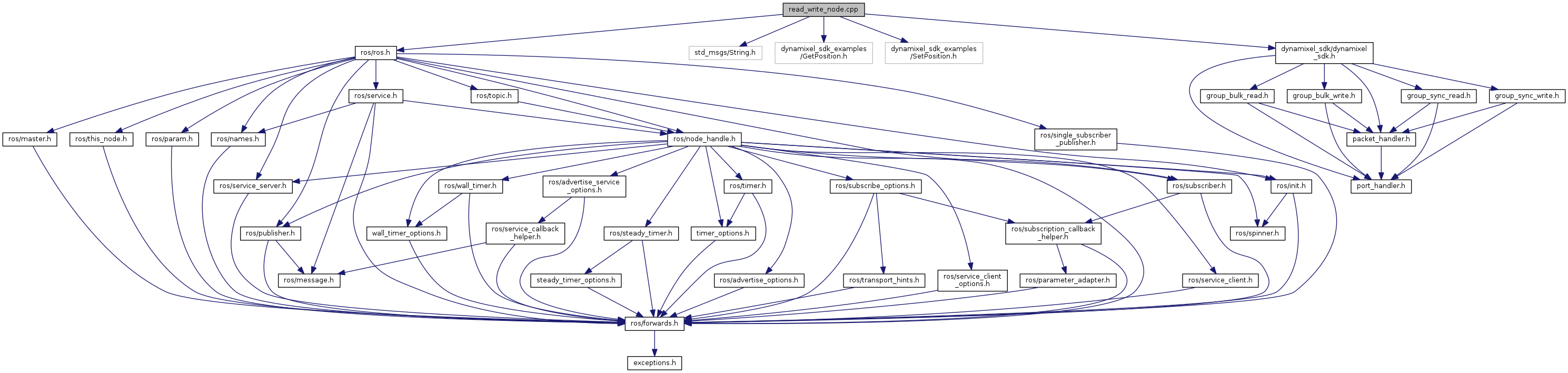
#include <ros/ros.h>#include "std_msgs/String.h"#include "dynamixel_sdk_examples/GetPosition.h"#include "dynamixel_sdk_examples/SetPosition.h"#include "dynamixel_sdk/dynamixel_sdk.h"
Include dependency graph for read_write_node.cpp:
Go to the source code of this file.
Macros | |
| #define | ADDR_GOAL_POSITION 116 |
| #define | ADDR_PRESENT_POSITION 132 |
| #define | ADDR_TORQUE_ENABLE 64 |
| #define | BAUDRATE 57600 |
| #define | DEVICE_NAME "/dev/ttyUSB0" |
| #define | DXL1_ID 1 |
| #define | DXL2_ID 2 |
| #define | PROTOCOL_VERSION 2.0 |
Functions | |
| bool | getPresentPositionCallback (dynamixel_sdk_examples::GetPosition::Request &req, dynamixel_sdk_examples::GetPosition::Response &res) |
| int | main (int argc, char **argv) |
| void | setPositionCallback (const dynamixel_sdk_examples::SetPosition::ConstPtr &msg) |
Variables | |
| PacketHandler * | packetHandler |
| PortHandler * | portHandler |
Macro Definition Documentation
| #define ADDR_GOAL_POSITION 116 |
Definition at line 48 of file read_write_node.cpp.
| #define ADDR_PRESENT_POSITION 132 |
Definition at line 49 of file read_write_node.cpp.
| #define ADDR_TORQUE_ENABLE 64 |
Definition at line 47 of file read_write_node.cpp.
| #define BAUDRATE 57600 |
Definition at line 57 of file read_write_node.cpp.
| #define DEVICE_NAME "/dev/ttyUSB0" |
Definition at line 58 of file read_write_node.cpp.
| #define DXL1_ID 1 |
Definition at line 55 of file read_write_node.cpp.
| #define DXL2_ID 2 |
Definition at line 56 of file read_write_node.cpp.
| #define PROTOCOL_VERSION 2.0 |
Definition at line 52 of file read_write_node.cpp.
Function Documentation
| bool getPresentPositionCallback | ( | dynamixel_sdk_examples::GetPosition::Request & | req, |
| dynamixel_sdk_examples::GetPosition::Response & | res | ||
| ) |
Definition at line 63 of file read_write_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 106 of file read_write_node.cpp.
| void setPositionCallback | ( | const dynamixel_sdk_examples::SetPosition::ConstPtr & | msg | ) |
Definition at line 87 of file read_write_node.cpp.
Variable Documentation
| PacketHandler* packetHandler |
Definition at line 61 of file read_write_node.cpp.
| PortHandler* portHandler |
Definition at line 60 of file read_write_node.cpp.