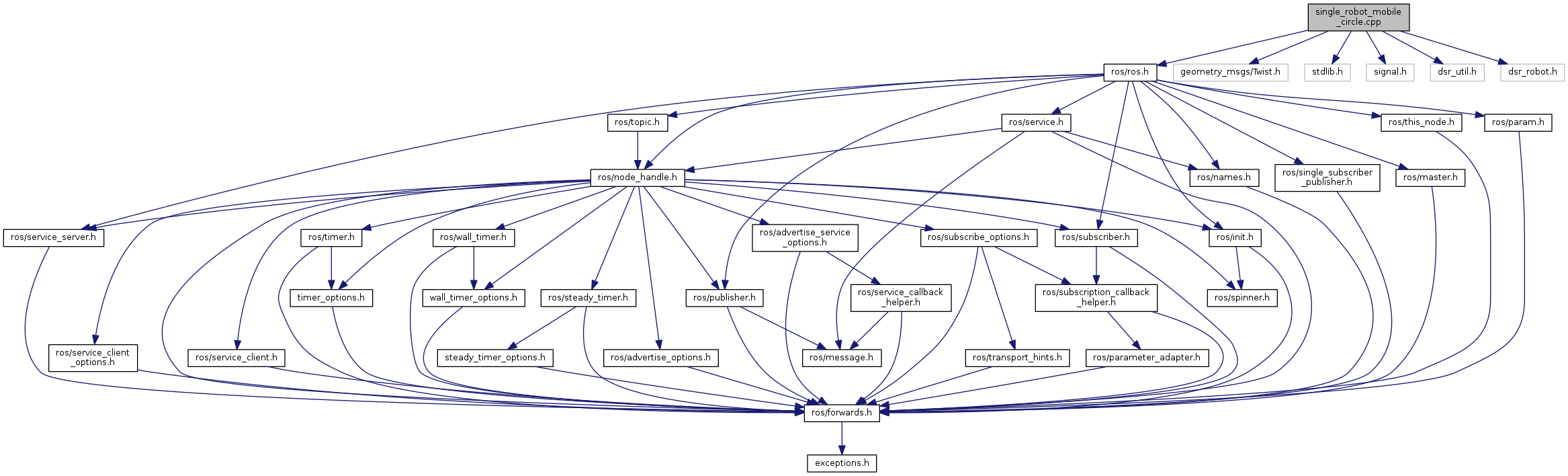
#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <stdlib.h>#include <signal.h>#include "dsr_util.h"#include "dsr_robot.h"
Include dependency graph for single_robot_mobile_circle.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| void | SET_ROBOT (string id, string model) |
| void | SigHandler (int sig) |
| static void | thread_mobile () |
Variables | |
| string | ROBOT_ID = "dsr01" |
| string | ROBOT_MODEL = "m1013" |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
ros::Subscriber subRobotState = nh.subscribe("/dsr01m1013/state", 100, msgRobotState_cb);
if(&robot) delete (&robot);
Definition at line 79 of file single_robot_mobile_circle.cpp.
| void SET_ROBOT | ( | string | id, |
| string | model | ||
| ) |
Definition at line 23 of file single_robot_mobile_circle.cpp.
| void SigHandler | ( | int | sig | ) |
Definition at line 57 of file single_robot_mobile_circle.cpp.
|
static |
Definition at line 28 of file single_robot_mobile_circle.cpp.
Variable Documentation
| string ROBOT_ID = "dsr01" |
Definition at line 21 of file single_robot_mobile_circle.cpp.
| string ROBOT_MODEL = "m1013" |
Definition at line 22 of file single_robot_mobile_circle.cpp.