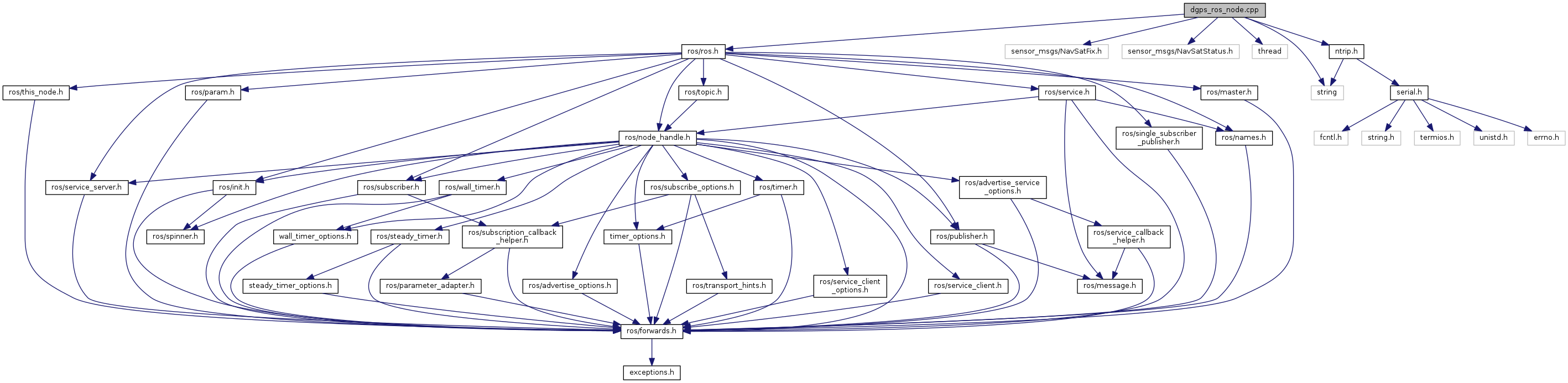
#include <ros/ros.h>#include <sensor_msgs/NavSatFix.h>#include <sensor_msgs/NavSatStatus.h>#include <thread>#include <string>#include "ntrip.h"
Include dependency graph for dgps_ros_node.cpp:
Go to the source code of this file.
Macros | |
| #define | COVARIANCE_TYPE_DIAGONAL_KNOWN 2 |
| #define | SERVICE_GPS 1 |
| #define | STATUS_FIX 0 |
| #define | STATUS_GBAS_FIX 2 |
| #define | STATUS_NO_FIX -1 |
Functions | |
| void | fillSatMessage (sensor_msgs::NavSatFix &sat, Location &loc) |
| int | main (int argc, char **argv) |
| double | NMEA2float (std::string s) |
Variables | |
| boost::array< double, 9 > | covariance |
Macro Definition Documentation
| #define COVARIANCE_TYPE_DIAGONAL_KNOWN 2 |
Definition at line 13 of file dgps_ros_node.cpp.
| #define SERVICE_GPS 1 |
Definition at line 12 of file dgps_ros_node.cpp.
| #define STATUS_FIX 0 |
Definition at line 10 of file dgps_ros_node.cpp.
| #define STATUS_GBAS_FIX 2 |
Definition at line 11 of file dgps_ros_node.cpp.
| #define STATUS_NO_FIX -1 |
Definition at line 9 of file dgps_ros_node.cpp.
Function Documentation
| void fillSatMessage | ( | sensor_msgs::NavSatFix & | sat, |
| Location & | loc | ||
| ) |
Definition at line 26 of file dgps_ros_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 54 of file dgps_ros_node.cpp.
| double NMEA2float | ( | std::string | s | ) |
Definition at line 15 of file dgps_ros_node.cpp.
Variable Documentation
| boost::array<double,9> covariance |
Initial value:
={1,0,0,
0,1,0,
0,0,1 }
Definition at line 22 of file dgps_ros_node.cpp.