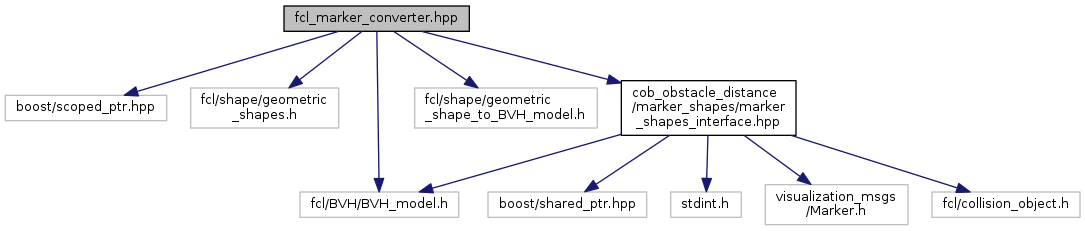
#include <boost/scoped_ptr.hpp>#include <fcl/shape/geometric_shapes.h>#include <fcl/BVH/BVH_model.h>#include <fcl/shape/geometric_shape_to_BVH_model.h>#include "cob_obstacle_distance/marker_shapes/marker_shapes_interface.hpp"
Include dependency graph for fcl_marker_converter.hpp:
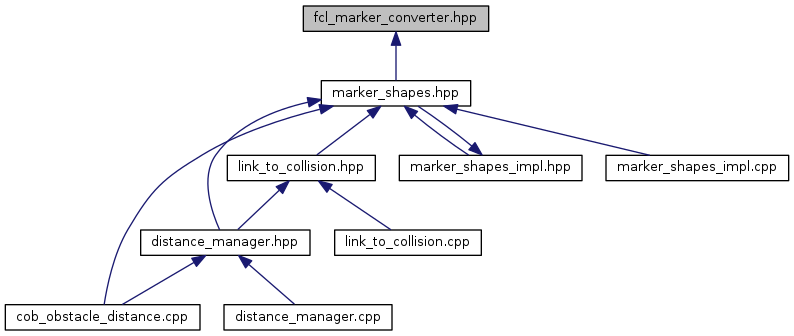
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | FclMarkerConverter< T > |
| class | FclMarkerConverter< fcl::Box > |
| class | FclMarkerConverter< fcl::Cylinder > |
| class | FclMarkerConverter< fcl::Sphere > |
Macros | |
| #define | RINGS 10u |
| #define | SEG_AXIS 10u |
| #define | SEG_CIRCLE 10u |
| #define | SEGMENTS 10u |
Macro Definition Documentation
| #define RINGS 10u |
Definition at line 33 of file fcl_marker_converter.hpp.
| #define SEG_AXIS 10u |
Definition at line 34 of file fcl_marker_converter.hpp.
| #define SEG_CIRCLE 10u |
Definition at line 35 of file fcl_marker_converter.hpp.
| #define SEGMENTS 10u |
Definition at line 32 of file fcl_marker_converter.hpp.