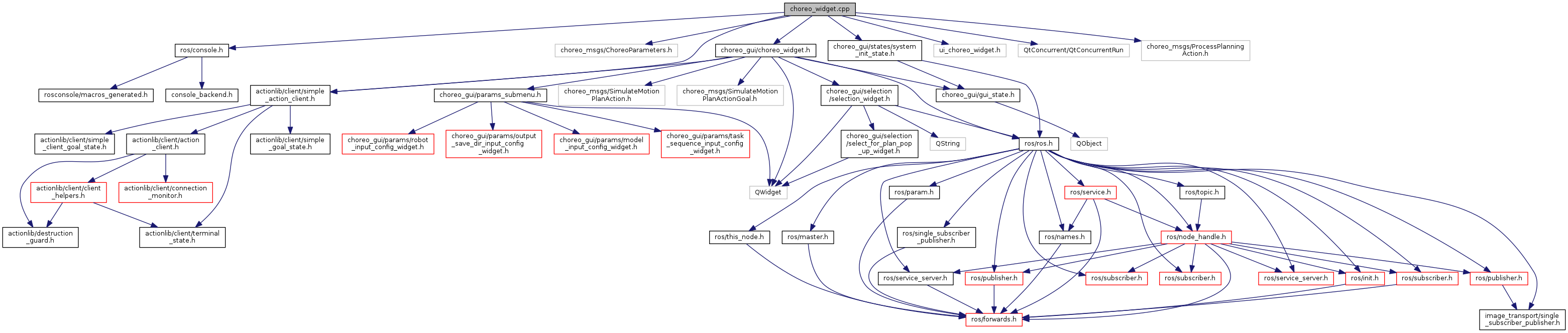
#include <ros/console.h>
#include "choreo_msgs/ChoreoParameters.h"
#include <choreo_gui/choreo_widget.h>
#include <choreo_gui/states/system_init_state.h>
#include <ui_choreo_widget.h>
#include <QtConcurrent/QtConcurrentRun>
#include <actionlib/client/simple_action_client.h>
#include <choreo_msgs/ProcessPlanningAction.h>
Go to the source code of this file.
| const std::string CHOREO_PARAMETERS_SERVICE = "choreo_parameters" |
| const std::string PROCESS_PLANNING_ACTION_CLIENT_NAME = "process_planning_action" |
|
static |
| const std::string SIMULATE_MOTION_PLAN_ACTION_SERVER_NAME = "simulate_motion_plan_as" |
|
static |