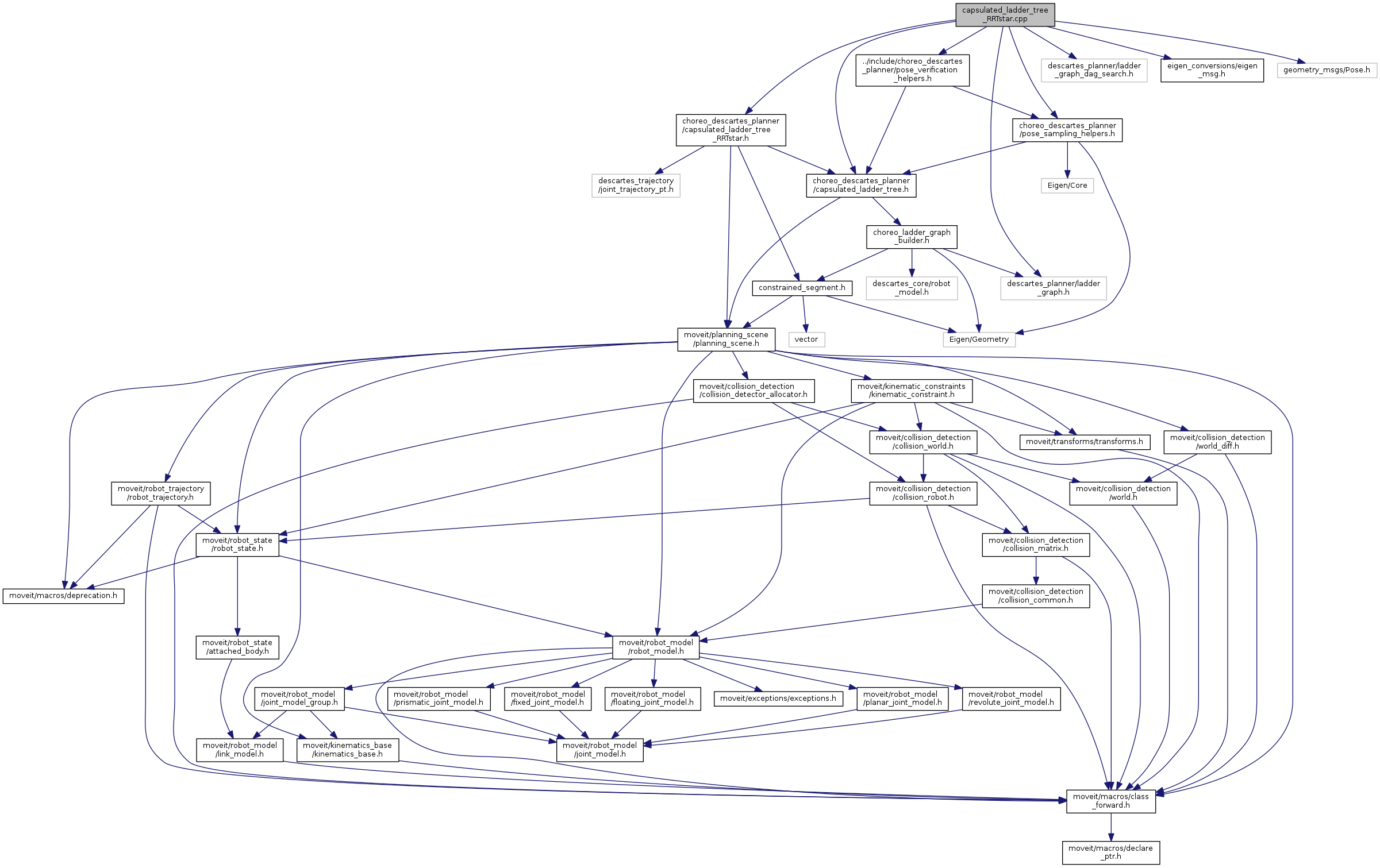
#include "choreo_descartes_planner/capsulated_ladder_tree.h"#include "choreo_descartes_planner/capsulated_ladder_tree_RRTstar.h"#include "choreo_descartes_planner/pose_sampling_helpers.h"#include "../include/choreo_descartes_planner/pose_verification_helpers.h"#include <descartes_planner/ladder_graph.h>#include <descartes_planner/ladder_graph_dag_search.h>#include <eigen_conversions/eigen_msg.h>#include <geometry_msgs/Pose.h>
Include dependency graph for capsulated_ladder_tree_RRTstar.cpp:
Go to the source code of this file.
Namespaces | |
| descartes_planner | |
Variables | |
| static const double | DEFAULT_UNIT_PROCESS_TIMEOUT = 30.0 |
Variable Documentation
|
static |
Definition at line 19 of file capsulated_ladder_tree_RRTstar.cpp.