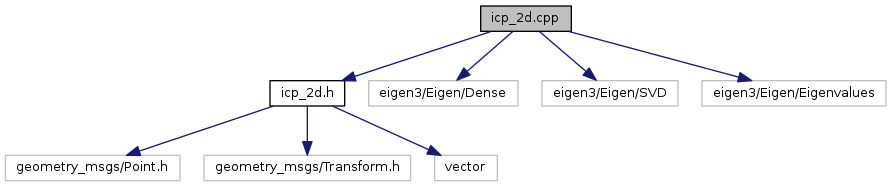
#include <icp_2d.h>#include <eigen3/Eigen/Dense>#include <eigen3/Eigen/SVD>#include <eigen3/Eigen/Eigenvalues>
Include dependency graph for icp_2d.cpp:
Go to the source code of this file.
Namespaces | |
| icp_2d | |
Functions | |
| double | icp_2d::alignICP (const std::vector< geometry_msgs::Point > source, const std::vector< geometry_msgs::Point > target, geometry_msgs::Transform &transform, size_t max_iterations=10, double min_delta_rmsd=0.000001) |
| Perform Iterative Closest Point (ICP) algorithm to align two point clouds in a two dimensional plane. More... | |
| bool | icp_2d::alignPCA (const std::vector< geometry_msgs::Point > source, const std::vector< geometry_msgs::Point > target, geometry_msgs::Transform &transform) |
| Perform PCA algorithm to align two point clouds in a two dimensional plane. More... | |
| bool | icp_2d::alignSVD (const std::vector< geometry_msgs::Point > source, const std::vector< geometry_msgs::Point > target, geometry_msgs::Transform &transform) |
| Perform SVD optimization to align two point clouds in a two dimensional plane. More... | |
| bool | icp_2d::computeCorrespondences (const std::vector< geometry_msgs::Point > &source, const std::vector< geometry_msgs::Point > &target, std::vector< geometry_msgs::Point > &correspondences) |
| geometry_msgs::Point | icp_2d::getCentroid (const std::vector< geometry_msgs::Point > points) |
| Get the centroid of a set of points. More... | |
| double | icp_2d::getRMSD (const std::vector< geometry_msgs::Point > source, const std::vector< geometry_msgs::Point > target) |
| double | icp_2d::thetaFromQuaternion (const geometry_msgs::Quaternion &q) |
| Get the 2d rotation from a quaternion. More... | |
| std::vector< geometry_msgs::Point > | icp_2d::transform (const std::vector< geometry_msgs::Point > &points, double x, double y, double theta) |
| Transform a vector of points in 2d. More... | |