#include <ros/ros.h>#include <map>#include <vector>#include <geometry_msgs/Pose.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/Vector3.h>#include <nav_msgs/OccupancyGrid.h>#include <nav_msgs/GetMap.h>#include <cpswarm_msgs/AreaDivisionEvent.h>#include <cpswarm_msgs/GetDouble.h>#include <cpswarm_msgs/ArrayOfStates.h>#include <cpswarm_msgs/StateEvent.h>#include <swarmros/String.h>#include "lib/area_division.h"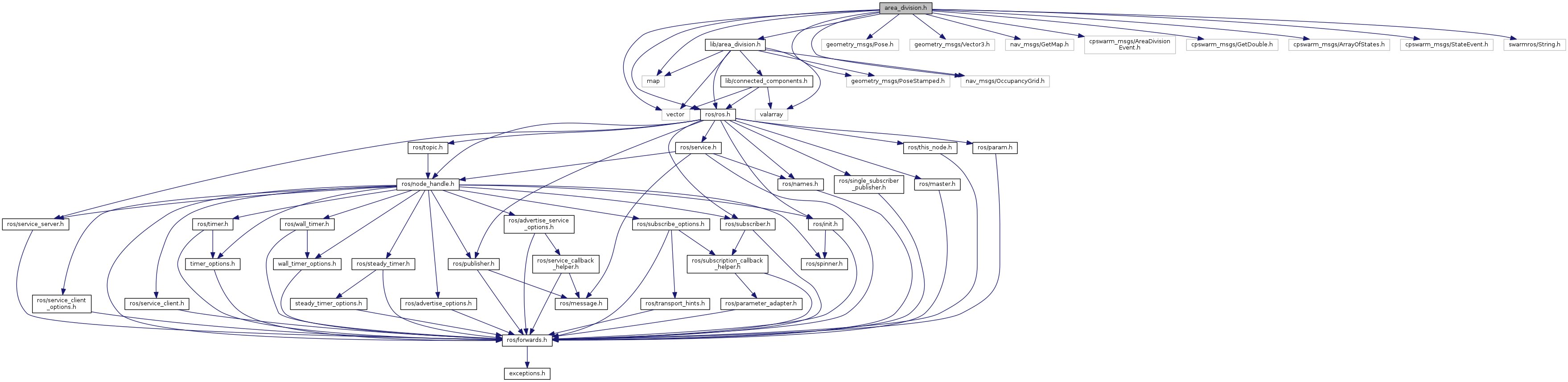
Go to the source code of this file.
Enumerations | |
| enum | state_t { IDLE = 0, INIT, ACTIVE, SYNC, DIVIDE, DEINIT } |
| An enumeration for the state of the division. More... | |
Variables | |
| Publisher | area_pub |
| Publisher to visualize the assigned area grid map. More... | |
| string | behavior |
| The current behavior state of this CPS. More... | |
| bool | behavior_valid |
| Whether a valid state has been received. More... | |
| vector< string > | behaviors |
| The behavior states in which area division is active. More... | |
| area_division * | division |
| The object encapsulating the area division optimization algorithm. More... | |
| Subscriber | division_sub |
| Subscriber to get area division requests from other CPSs. More... | |
| nav_msgs::OccupancyGrid | global_map |
| The complete grid map. More... | |
| Publisher | map_ds_pub |
| Publisher to visualize the downsampled map. More... | |
| Publisher | map_rot_pub |
| Publisher to visualize the rotated map. More... | |
| Subscriber | map_sub |
| Subscriber to get grid map. More... | |
| bool | map_valid |
| Whether a valid grid map has been received. More... | |
| Publisher | pos_pub |
| Publisher to stop the CPS. More... | |
| geometry_msgs::Pose | pose |
| Current position of the CPS. More... | |
| Subscriber | pose_sub |
| Subscriber to get CPS position. More... | |
| bool | pose_valid |
| Whether a valid position has been received. More... | |
| Rate * | rate |
| ROS rate object for controlling loop rates. More... | |
| double | resolution |
| The grid map underlying the area division will be downsampled to this resolution in meter / cell. More... | |
| ServiceClient | rotater_cli |
| Service client to get the angle which the area has to be rotated by. More... | |
| state_t | state |
| The state of the area division node. More... | |
| map< string, Time > | swarm |
| The UUIDs of the other swarm members. More... | |
| map< string, geometry_msgs::PoseStamped > | swarm_pose |
| The positions of the other swarm members. More... | |
| Publisher | swarm_pub |
| Publisher to syncronize with other CPSs. More... | |
| Subscriber | swarm_sub |
| Subscriber to get information about other CPSs in the swarm. More... | |
| double | swarm_timeout |
| The time in seconds communication in the swarm can be delayed at most. Used to wait after an area division event before starting the area division or time after which it is assumed that a swarm member has left the swarm if no position update has been received. More... | |
| bool | swarm_valid |
| Whether valid state information has been received from the other swarm members. More... | |
| Time | sync_start |
| The time at which the synchronization for the area division started. More... | |
| geometry_msgs::Vector3 | translation |
| The translation by which the area has been shifted. More... | |
| string | uuid |
| UUID of this CPS. More... | |
| Subscriber | uuid_sub |
| Subscriber to get CPS UUID. More... | |
| bool | visualize |
| Whether to publish the area division on a topic for visualization. More... | |
Enumeration Type Documentation
| enum state_t |
An enumeration for the state of the division.
| Enumerator | |
|---|---|
| IDLE | |
| INIT | |
| ACTIVE | |
| SYNC | |
| DIVIDE | |
| DEINIT | |
Definition at line 25 of file area_division.h.
Variable Documentation
| Publisher area_pub |
Publisher to visualize the assigned area grid map.
Definition at line 77 of file area_division.h.
| string behavior |
The current behavior state of this CPS.
Definition at line 107 of file area_division.h.
| bool behavior_valid |
Whether a valid state has been received.
Definition at line 112 of file area_division.h.
| vector<string> behaviors |
The behavior states in which area division is active.
Definition at line 117 of file area_division.h.
| area_division* division |
The object encapsulating the area division optimization algorithm.
Definition at line 157 of file area_division.h.
| Subscriber division_sub |
Subscriber to get area division requests from other CPSs.
Definition at line 62 of file area_division.h.
| nav_msgs::OccupancyGrid global_map |
The complete grid map.
Definition at line 147 of file area_division.h.
| Publisher map_ds_pub |
Publisher to visualize the downsampled map.
Definition at line 87 of file area_division.h.
| Publisher map_rot_pub |
Publisher to visualize the rotated map.
Definition at line 82 of file area_division.h.
| Subscriber map_sub |
Subscriber to get grid map.
Definition at line 57 of file area_division.h.
| bool map_valid |
Whether a valid grid map has been received.
Definition at line 152 of file area_division.h.
| Publisher pos_pub |
Publisher to stop the CPS.
Definition at line 67 of file area_division.h.
| geometry_msgs::Pose pose |
Current position of the CPS.
Definition at line 137 of file area_division.h.
| Subscriber pose_sub |
Subscriber to get CPS position.
Definition at line 47 of file area_division.h.
| bool pose_valid |
Whether a valid position has been received.
Definition at line 142 of file area_division.h.
| Rate* rate |
ROS rate object for controlling loop rates.
Definition at line 97 of file area_division.h.
| double resolution |
The grid map underlying the area division will be downsampled to this resolution in meter / cell.
Definition at line 167 of file area_division.h.
| ServiceClient rotater_cli |
Service client to get the angle which the area has to be rotated by.
Definition at line 92 of file area_division.h.
| state_t state |
The state of the area division node.
Definition at line 37 of file area_division.h.
| map<string, Time> swarm |
The UUIDs of the other swarm members.
Definition at line 127 of file area_division.h.
| map<string, geometry_msgs::PoseStamped> swarm_pose |
The positions of the other swarm members.
Definition at line 122 of file area_division.h.
| Publisher swarm_pub |
Publisher to syncronize with other CPSs.
Definition at line 72 of file area_division.h.
| Subscriber swarm_sub |
Subscriber to get information about other CPSs in the swarm.
Definition at line 52 of file area_division.h.
| double swarm_timeout |
The time in seconds communication in the swarm can be delayed at most. Used to wait after an area division event before starting the area division or time after which it is assumed that a swarm member has left the swarm if no position update has been received.
Definition at line 172 of file area_division.h.
| bool swarm_valid |
Whether valid state information has been received from the other swarm members.
Definition at line 132 of file area_division.h.
| Time sync_start |
The time at which the synchronization for the area division started.
Definition at line 182 of file area_division.h.
| geometry_msgs::Vector3 translation |
The translation by which the area has been shifted.
Definition at line 162 of file area_division.h.
| string uuid |
UUID of this CPS.
Definition at line 102 of file area_division.h.
| Subscriber uuid_sub |
Subscriber to get CPS UUID.
Definition at line 42 of file area_division.h.
| bool visualize |
Whether to publish the area division on a topic for visualization.
Definition at line 177 of file area_division.h.