#include <ardrone_autonomy/teleop_twist.h>#include "ardrone_autonomy/LedAnim.h"#include "utils/ardrone_date.h"#include <algorithm>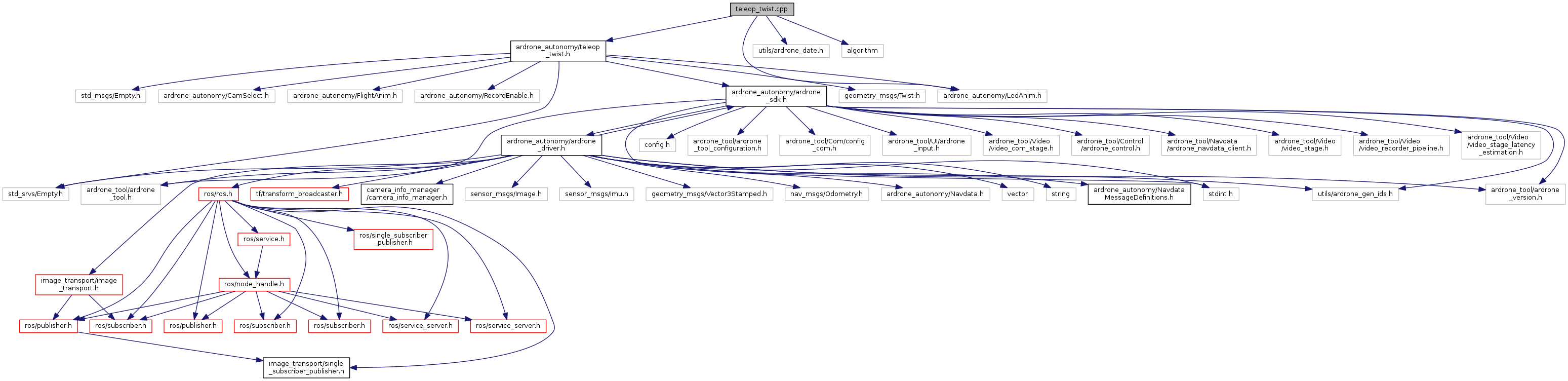
Go to the source code of this file.
Functions | |
| C_RESULT | close_teleop (void) |
| void | CmdVelCallback (const geometry_msgs::TwistConstPtr &msg) |
| bool | FlatTrimCallback (std_srvs::Empty::Request &request, std_srvs::Empty::Response &response) |
| void | LandCallback (const std_msgs::Empty &msg) |
| C_RESULT | open_teleop (void) |
| void | ResetCallback (const std_msgs::Empty &msg) |
| bool | SetCamChannelCallback (ardrone_autonomy::CamSelect::Request &request, ardrone_autonomy::CamSelect::Response &response) |
| bool | SetFlightAnimationCallback (ardrone_autonomy::FlightAnim::Request &request, ardrone_autonomy::FlightAnim::Response &response) |
| bool | SetLedAnimationCallback (ardrone_autonomy::LedAnim::Request &request, ardrone_autonomy::LedAnim::Response &response) |
| bool | SetRecordCallback (ardrone_autonomy::RecordEnable::Request &request, ardrone_autonomy::RecordEnable::Response &response) |
| void | TakeoffCallback (const std_msgs::Empty &msg) |
| bool | ToggleCamCallback (std_srvs::Empty::Request &request, std_srvs::Empty::Response &response) |
| C_RESULT | update_teleop (void) |
Variables | |
| int | cam_state = DEFAULT_CAM_STATE |
| geometry_msgs::Twist | cmd_vel |
| int32_t | detect_disable_placeholder = 0 |
| int32_t | detect_dtype = CAD_TYPE_MULTIPLE_DETECTION_MODE |
| int32_t | detect_enable_placeholder = 1 |
| int32_t | detect_enemy_color = ARDRONE_DETECTION_COLOR_ORANGE_YELLOW |
| int32_t | detect_hori_type = TAG_TYPE_MASK(TAG_TYPE_SHELL_TAG_V2) |
| int32_t | detect_indoor_hull = 0 |
| int32_t | detect_vert_type = TAG_TYPE_MASK(TAG_TYPE_BLACK_ROUNDEL) |
| const LED_ANIMATION_IDS | ledAnimMap [14] |
| bool | needs_land = false |
| bool | needs_reset = false |
| bool | needs_takeoff = false |
| float | old_front_back = -10.0 |
| float | old_left_right = -10.0 |
| float | old_turn = -10.0 |
| float | old_up_down = -10.0 |
| int | set_navdata_demo_value = DEFAULT_NAVDATA_DEMO |
| input_device_t | teleop |
Detailed Description
Software License Agreement (BSD)
- Copyright
- Copyright (c) 2012, Autonomy Lab (Simon Fraser University), All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met: Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer. Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution. Neither the name of Autonomy Lab nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WAR- RANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, IN- DIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
Definition in file teleop_twist.cpp.
Function Documentation
| C_RESULT close_teleop | ( | void | ) |
Definition at line 259 of file teleop_twist.cpp.
| void CmdVelCallback | ( | const geometry_msgs::TwistConstPtr & | msg | ) |
Definition at line 148 of file teleop_twist.cpp.
| bool FlatTrimCallback | ( | std_srvs::Empty::Request & | request, |
| std_srvs::Empty::Response & | response | ||
| ) |
Definition at line 139 of file teleop_twist.cpp.
| void LandCallback | ( | const std_msgs::Empty & | msg | ) |
Definition at line 163 of file teleop_twist.cpp.
| C_RESULT open_teleop | ( | void | ) |
Definition at line 184 of file teleop_twist.cpp.
| void ResetCallback | ( | const std_msgs::Empty & | msg | ) |
Definition at line 170 of file teleop_twist.cpp.
| bool SetCamChannelCallback | ( | ardrone_autonomy::CamSelect::Request & | request, |
| ardrone_autonomy::CamSelect::Response & | response | ||
| ) |
Definition at line 59 of file teleop_twist.cpp.
| bool SetFlightAnimationCallback | ( | ardrone_autonomy::FlightAnim::Request & | request, |
| ardrone_autonomy::FlightAnim::Response & | response | ||
| ) |
Definition at line 125 of file teleop_twist.cpp.
| bool SetLedAnimationCallback | ( | ardrone_autonomy::LedAnim::Request & | request, |
| ardrone_autonomy::LedAnim::Response & | response | ||
| ) |
Definition at line 112 of file teleop_twist.cpp.
| bool SetRecordCallback | ( | ardrone_autonomy::RecordEnable::Request & | request, |
| ardrone_autonomy::RecordEnable::Response & | response | ||
| ) |
Definition at line 81 of file teleop_twist.cpp.
| void TakeoffCallback | ( | const std_msgs::Empty & | msg | ) |
Definition at line 177 of file teleop_twist.cpp.
| bool ToggleCamCallback | ( | std_srvs::Empty::Request & | request, |
| std_srvs::Empty::Response & | response | ||
| ) |
Definition at line 70 of file teleop_twist.cpp.
| C_RESULT update_teleop | ( | void | ) |
Definition at line 189 of file teleop_twist.cpp.
Variable Documentation
| int cam_state = DEFAULT_CAM_STATE |
Definition at line 41 of file teleop_twist.cpp.
| geometry_msgs::Twist cmd_vel |
Definition at line 35 of file teleop_twist.cpp.
| int32_t detect_disable_placeholder = 0 |
Definition at line 48 of file teleop_twist.cpp.
| int32_t detect_dtype = CAD_TYPE_MULTIPLE_DETECTION_MODE |
Definition at line 44 of file teleop_twist.cpp.
| int32_t detect_enable_placeholder = 1 |
Definition at line 49 of file teleop_twist.cpp.
| int32_t detect_enemy_color = ARDRONE_DETECTION_COLOR_ORANGE_YELLOW |
Definition at line 43 of file teleop_twist.cpp.
| int32_t detect_hori_type = TAG_TYPE_MASK(TAG_TYPE_SHELL_TAG_V2) |
Definition at line 45 of file teleop_twist.cpp.
| int32_t detect_indoor_hull = 0 |
Definition at line 47 of file teleop_twist.cpp.
| int32_t detect_vert_type = TAG_TYPE_MASK(TAG_TYPE_BLACK_ROUNDEL) |
Definition at line 46 of file teleop_twist.cpp.
| const LED_ANIMATION_IDS ledAnimMap[14] |
Definition at line 51 of file teleop_twist.cpp.
| bool needs_land = false |
Definition at line 33 of file teleop_twist.cpp.
| bool needs_reset = false |
Definition at line 34 of file teleop_twist.cpp.
| bool needs_takeoff = false |
Definition at line 32 of file teleop_twist.cpp.
| float old_front_back = -10.0 |
Definition at line 37 of file teleop_twist.cpp.
| float old_left_right = -10.0 |
Definition at line 36 of file teleop_twist.cpp.
| float old_turn = -10.0 |
Definition at line 39 of file teleop_twist.cpp.
| float old_up_down = -10.0 |
Definition at line 38 of file teleop_twist.cpp.
| int set_navdata_demo_value = DEFAULT_NAVDATA_DEMO |
Definition at line 42 of file teleop_twist.cpp.
| input_device_t teleop |
Definition at line 264 of file teleop_twist.cpp.