Calibration correction algorithm
When extracting the robot’s calibration there will be a set of Denavit–Hartenberg (DH) parameters
describing the robot. Due to the calibration process they can seem a bit unintuitive since the
d-parameter of the second and third joint can be quite large on those.
For example, let’s consider the following dh parameters taken from a real robot:
# joint1 joint2 joint3 joint4 joint5 joint6
dh_theta: [-2.4147806894359e-07 1.60233952386695 -1.68607190752171 0.0837331147700119 -1.01260355871158e-07 3.91986209186124e-08 ]
dh_a: [ 2.12234865571206e-05 0.0193171326277006 -0.569251663611088 -4.61409023720934e-05 -6.39280053471802e-05 0 ]
dh_d: [ 0.180539811714259 439.140974079901 -446.027059806332 7.0603368964236 0.119811341150314 0.115670917257426 ]
dh_alpha: [ 1.57014608044242 0.0013941666682559 0.00693818880325995 1.56998468543761 -1.57038520649543 0 ]
One can see that the upper arm is placed 439 m out of the base link with the lower arm being 7 m to the other side.
We can build a robot description that splits each DH segment into two links: One for d and
theta representing the rotational part of the joint and one for a and alpha
representing the “passive” part of the joint displacing the next link.
Fig. 1 shows (a part of) the description matching the parameters above. The
arm links are left out of the image as they are really far away.
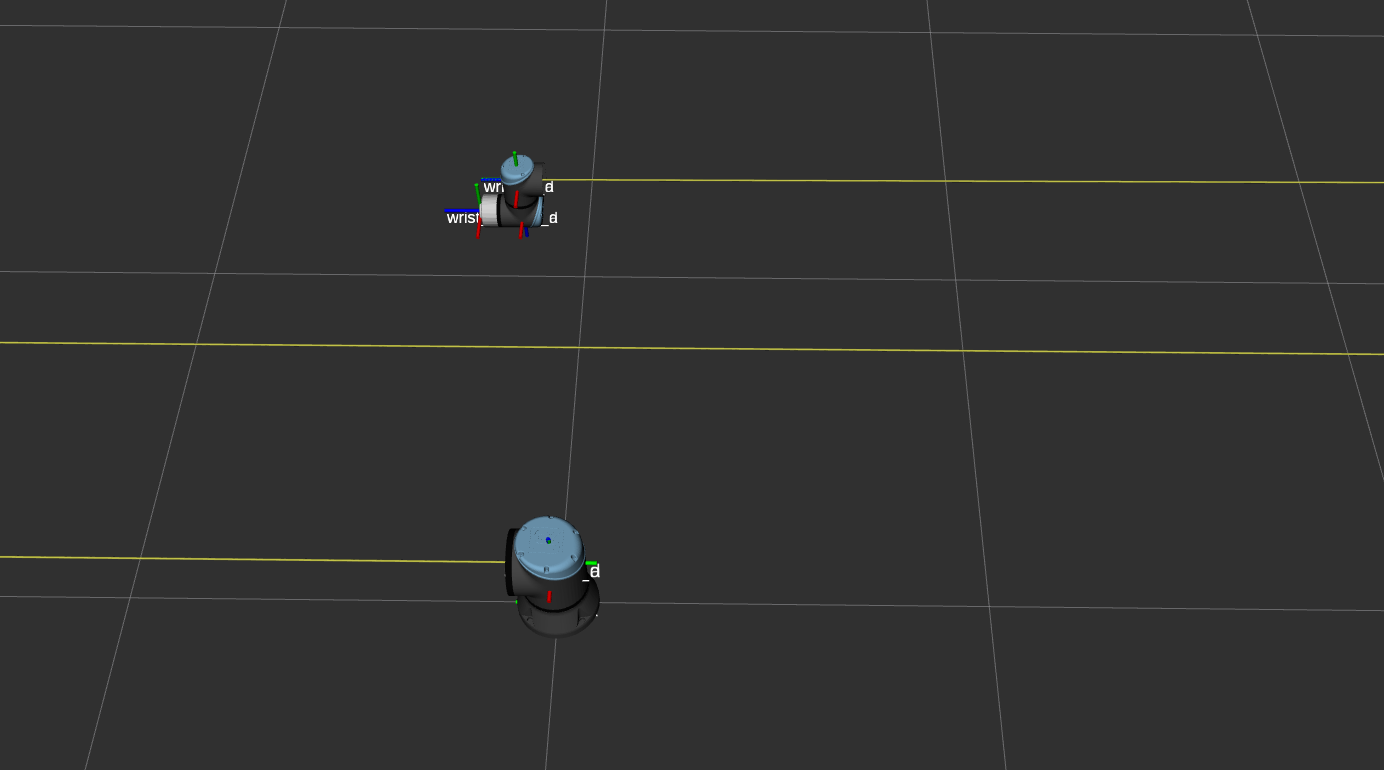
Fig. 1 This shows an example calibrated model when using the DH parameters directly as explained above. The two arm links are virtually displaced very far from the physical robot while the TCP ends up at the correct location again
For explaining the correction algorithm, we will use an artificial set of DH parameters for a UR10e:
# join1 joint2 joint3 joint4 joint5 joint6
dh_theta: [0 0 0 0 0 0 ]
dh_a: [0 -0.6127 -0.57155 0 0 0 ]
dh_d: [0.1807 1 0.5 -1.32585 0.11985 0.11655]
dh_alpha: [1.570796327 0.2 0 1.570796327 -1.570796327 0 ]
The resulting uncorrected model can be seen in Fig. 2. The upper arm is
placed 1 m to the left of the shoulder, the upper arm is placed 0.5 m further out and there’s an
added alpha rotation in joint2.
Note: This is not a valid calibration, so when placing this “calibration” on a robot and using the correction, we won’t get correct tcp pose results. This only serves as a exaggerated example.
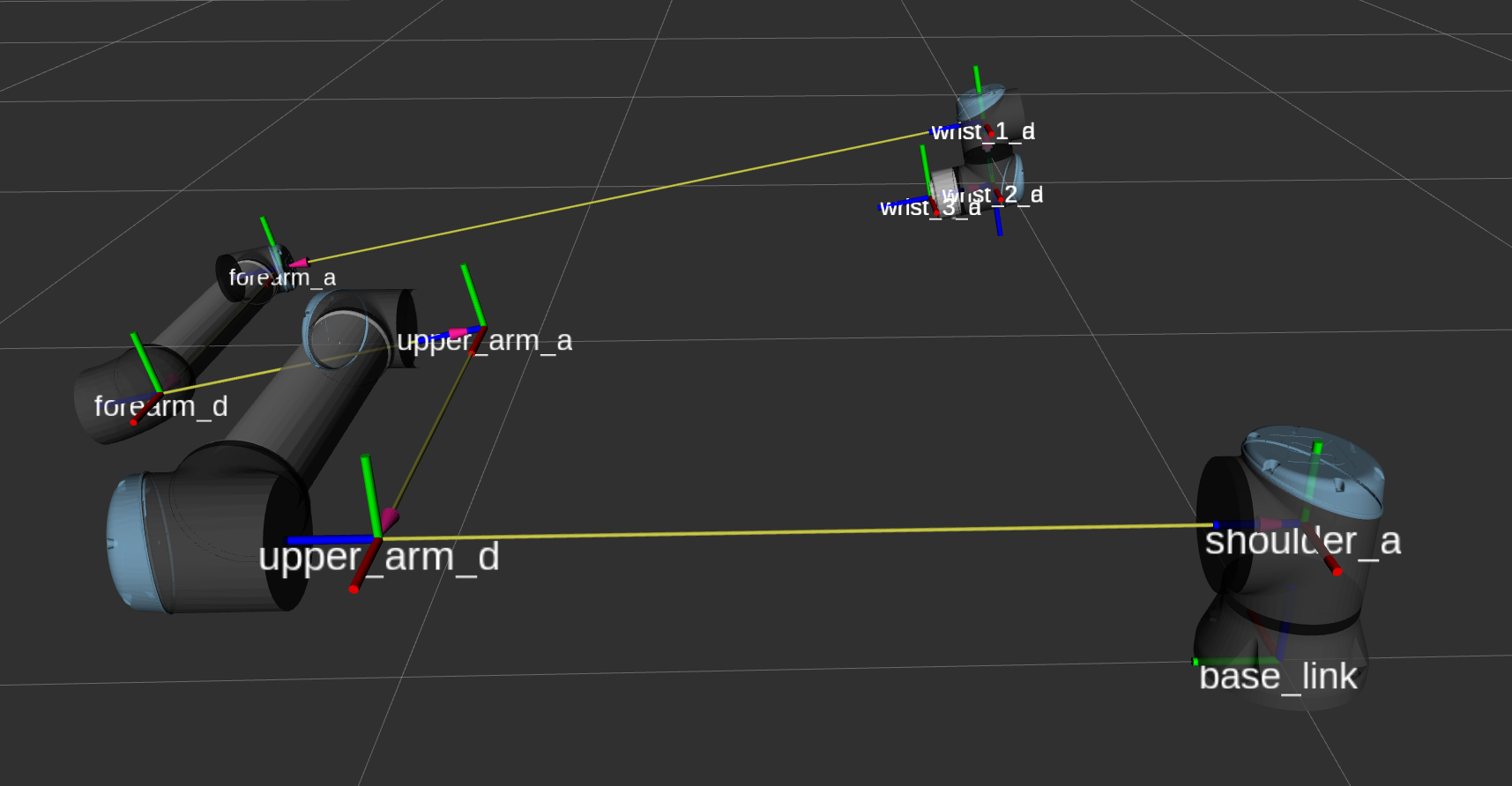
Fig. 2 This shows an artificial calibration only to show the algorithm. This is no valid calibration!
In Fig. 2 the separation between the two DH components can be seen quite
clearly. joint2’s d and theta parameters are represented by upper_arm_d and its a
and alpha parameters result in upper_arm_a.
The “correction” step tries to bring the two arm segments back to their physical representation. In principle, the d parameter to zero, first. With this change, the kinematic structure gets destroyed, which has to be corrected:
With setting
dto 0, both the start (upper_arm_d) and end (upper_arm_a) points of the passive segment move along the joint’s rotational axis. Instead, the end point of the passive segment has to move along the rotational axis of the next segment. This requires adaptingaandtheta, if the two rotational axes are not parallel.The length of moving along the next segment’s rotational axis is calculated by intersecting the next rotational axis with the XY-plane of the moved
_dframe. This gets subtracted from the next joint’sdparameter.
Note that the parameters from this model are not strict DH parameters anymore, as the two frames at the tip of the upper and lower arm have to get an additional rotation to compensate the change of the arm segment orientation, when the tip is moving along its rotation axis.
The resulting “DH parameters” are then reassembled into six individual transforms that can become the six frames of the robot’s kinematic chain. This is exported in a yaml representation and gets read by the description package.
Also, no correction of the visual meshes is performed. Strictly speaking, the visual model is not 100 % correct, but with a calibrated model and ideal meshes this cannot be achieved and the inaccuracies introduced by this are considered negligible.
The example as visualized in Fig. 1 looks as follows if a description with the correct parameters is loaded:
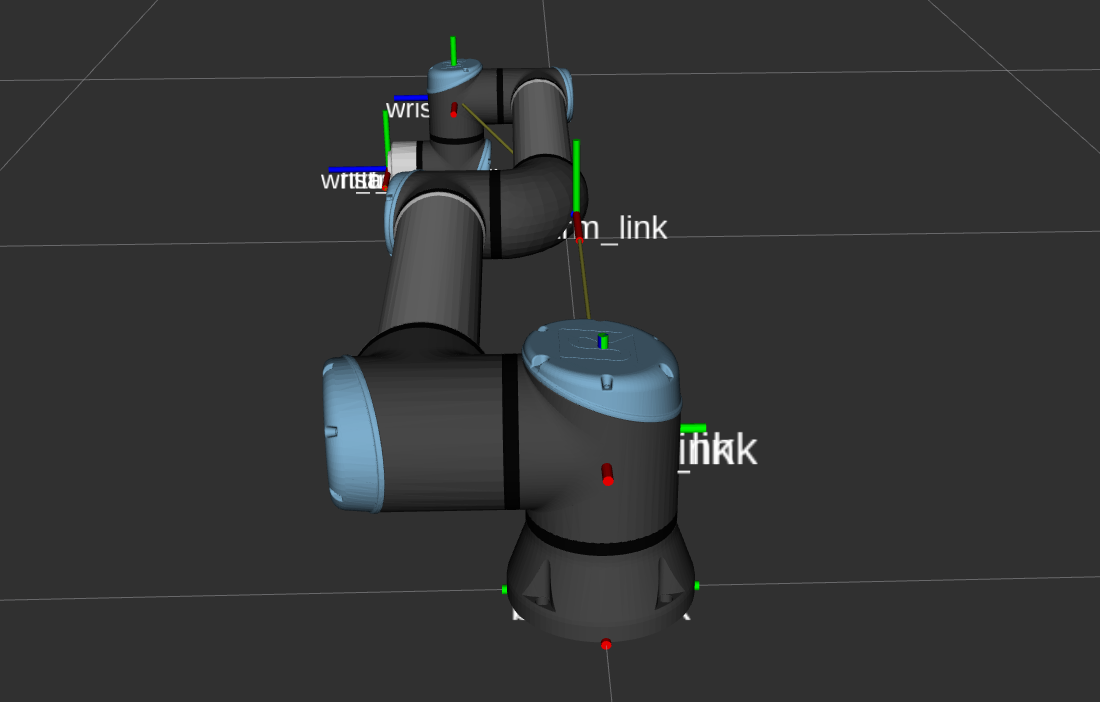
Fig. 3 This shows the model from Fig. 1 with the calibration correction applied.
The robot is correctly assembled and the base->tool0 transformation is exactly the same as
on the robot controller.