Nodes and Components
This package includes a number of ROS 2 components that can be assembled into depth image processing pipelines. See the tutorial Launching depth_image_proc Components.
Alternatively, each component can be run as a standalone node.
depth_image_proc::ConvertMetricNode
Component to convert raw uint16 depth image in millimeters to
float depth image in meters.
Also available as a standalone node with the name convert_metric_node.
Subscribed Topics
image_raw (sensor_msgs/Image):
uint16depth image in millimeters, the native OpenNI format.
Published Topics
image (sensor_msgs/Image):
floatdepth image in meters, the recommended format for processing in ROS 2.
Parameters
image_transport (string, default: raw): Image transport to use.
depth_image_proc::CropForemostNode
Takes a depth image and crops the closest element. The node will find the
minimum depth value in the image and then set all pixels farther than
min + distance to 0. Also available as a standalone node
crop_foremost_node.
Subscribed Topics
image_raw (sensor_msgs/Image): Must be a depth (single channel) image.
Published Topics
image (sensor_msgs/Image): Cropped image.
Parameters
distance (float, default: 0.0): The depth tolerance to use when thresholding the image. Pixels farther than
min + distancewill be set to 0.image_transport (string, default: raw): Image transport to use.
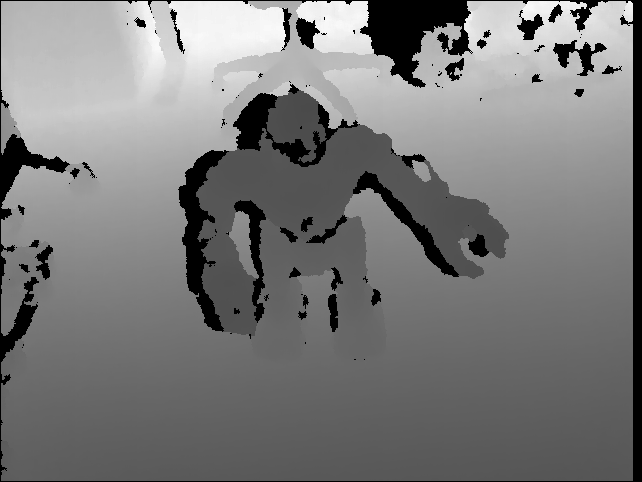
depth_image_proc::DisparityNode
Converts a depth image to disparity image. Also available as a standalone
node disparity_node.
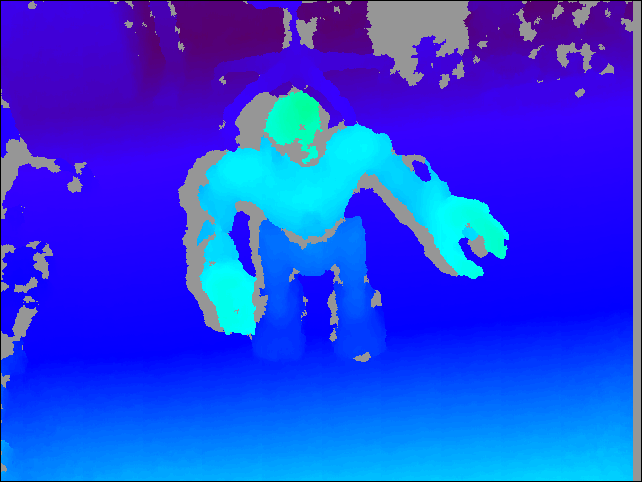
The images below show the raw depth image, and the output disparity image.
The output disparity image is being colorized using the disparity_view
node from the image_view package.
Subscribed Topics
left/image_rect (sensor_msgs/Image): Rectified depth image.
right/camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata. Must contain the baseline, which conventionally is encoded in the right camera P matrix.
Published Topics
left/disparity (stereo_msgs/DisparityImage): Disparity image (inversely related to depth), for interop with stereo processing nodes. For all other purposes use depth images instead.
Parameters
delta_d (double, default: 0.125): Smallest allowed disparity increment, which relates to the achievable depth range resolution. Defaults to 1/8 pixel.
image_transport (string, default: raw): Image transport to use.
min_range (double, default: 0.0): Minimum detectable distance.
max_range (double, default: +Inf): Maximum detectable distance.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
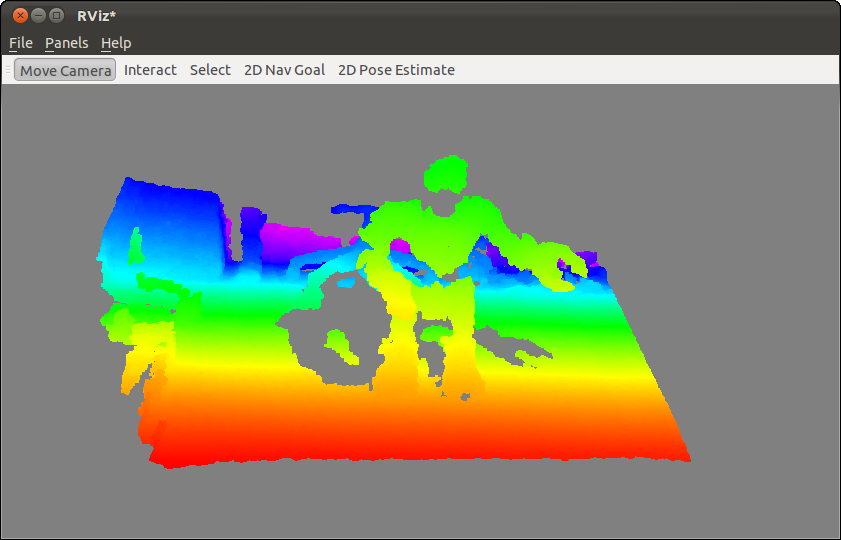
depth_image_proc::PointCloudXyzNode
Converts a depth image to XYZ point cloud. Also available as a standalone
node point_cloud_xyz_node.
The images below show the raw depth image, and the output point cloud,
colorized along the Z-axis.
Subscribed Topics
image_rect (sensor_msgs/Image): Rectified depth image.
camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata.
Published Topics
points (sensor_msgs/PointCloud2): XYZ point cloud. If using PCL, subscribe as PointCloud<PointXYZ>.
Parameters
depth_image_transport (string, default: raw): Image transport to use for the depth topic subscriber.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
invalid_depth (double, default: 0.0): Value used for replacing invalid depth values (if 0.0 the parameter has no effect).
depth_image_proc::PointCloudXyzRadialNode
Converts a radial depth image to an XYZ point cloud. Note that radial nodes
assume an unrectified radial image, and therefore use the K and D matrices
of the camera info message, rather than the P matrix. Also available as a
standalone node point_cloud_xyz_radial_node.
Subscribed Topics
depth/image_raw (sensor_msgs/Image): Unrectified radial depth image.
depth/camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata.
Published Topics
points (sensor_msgs/PointCloud2): XYZ point cloud. If using PCL, subscribe as PointCloud<PointXYZ>.
Parameters
depth_image_transport (string, default: raw): Image transport to use for the depth topic subscriber.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
depth_image_proc::PointCloudXyziNode
Component to convert depth image to XYZI point cloud. Also available as a
standalone node point_cloud_xyzi_node.
Subscribed Topics
depth/image_rect (sensor_msgs/Image): Rectified depth image.
intensity/image_rect (sensor_msgs/Image): Rectified intensity image.
intensity/camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata.
Published Topics
points (sensor_msgs/PointCloud2): XYZ point cloud. If using PCL, subscribe as PointCloud<PointXYZI>.
Parameters
depth_image_transport (string, default: raw): Image transport to use for the depth topic subscriber.
image_transport (string, default: raw): Image transport to use for the intensity image subscriber.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
invalid_depth (double, default: 0.0): Value used for replacing invalid depth values (if 0.0 the parameter has no effect).
depth_image_proc::PointCloudXyziRadialNode
Converts a radial depth image and an intensity image to an XYZI point cloud.
Note that radial nodes assume an unrectified radial image, and therefore
use the K and D matrices of the camera info message, rather than the P matrix.
Also available as a standalone node point_cloud_xyzi_radial_node.
Subscribed Topics
depth/image_raw (sensor_msgs/Image): Unrectified radial depth image.
intensity/image_raw (sensor_msgs/Image): Unrectified intensity image.
intensity/camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata.
Published Topics
points (sensor_msgs/PointCloud2): XYZI point cloud. If using PCL, subscribe as PointCloud<PointXYZI>.
Parameters
depth_image_transport (string, default: raw): Image transport to use for the depth topic subscriber.
image_transport (string, default: raw): Image transport to use for the intensity image subscriber.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
depth_image_proc::PointCloudXyzrgbNode
Combines a registered depth image and an RGB image into XYZRGB point cloud.
Also available as a standalone node point_cloud_xyzrgb_node.

The node can convert the registered depth and rgb images (above) into a colorized point cloud (below):
Subscribed Topics
depth_registered/image_rect (sensor_msgs/Image): Rectified depth image, registered to the RGB camera
rgb/image_rect_color (sensor_msgs/Image): Rectified color image.
rgb/camera_info (sensor_msgs/CameraInfo): RGB camera calibration and metadata.
Published Topics
points (sensor_msgs/PointCloud2): XYZ point cloud. If using PCL, subscribe as PointCloud<PointXYZRGB>.
Parameters
depth_image_transport (string, default: raw): Image transport to use for depth_registered subscriber.
image_transport (string, default: raw): Image transport to use for rgb/image_rect_color subscriber.
exact_sync (bool, default: False): Whether to use exact synchronizer.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
invalid_depth (double, default: 0.0): Value used for replacing invalid depth values (if 0.0 the parameter has no effect).
depth_image_proc::PointCloudXyzrgbRadialNode
Converts a radial depth image and an rgb image to an XYZRGB point cloud.
Note that radial nodes assume an unrectified radial image, and therefore
use the K and D matrices of the camera info message, rather than the P matrix.
Also available as a standalone node point_cloud_xyzrgb_radial_node.
Subscribed Topics
depth/image_raw (sensor_msgs/Image): Unrectified radial depth image.
rgb/image_raw (sensor_msgs/Image): Unrectified rgb image.
rgb/camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata.
Published Topics
points (sensor_msgs/PointCloud2): XYZRGB point cloud. If using PCL, subscribe as PointCloud<PointXYZRGB>.
Parameters
depth_image_transport (string, default: raw): Image transport to use for the depth topic subscriber.
image_transport (string, default: raw): Image transport to use for the rgb image subscriber.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
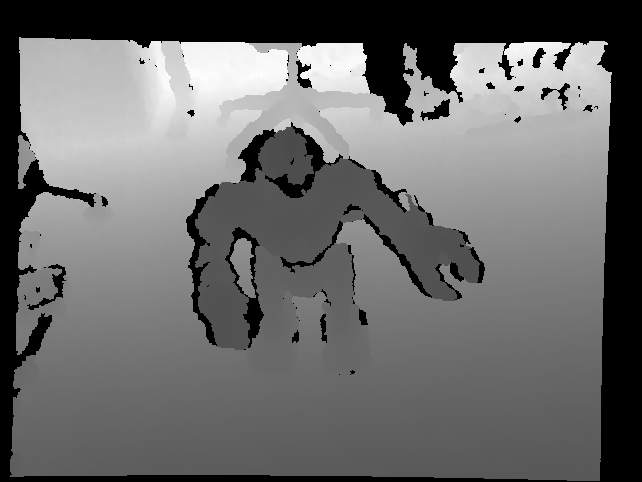
depth_image_proc::RegisterNode
Component to “register” a depth image to another camera frame. Reprojecting the depths requires the calibration parameters of both cameras and, from tf, and the extrinsic transform between them. The images below show the depth image before and after apply registration:
Subscribed Topics
depth/image_rect (sensor_msgs/Image): Rectified depth image. The image should be either 16UC1 (which is interpreted as millimeters) or 32FC1 (which is interpreted as meters).
depth/camera_info (sensor_msgs/CameraInfo): Depth camera calibration and metadata.
rgb/camera_info (sensor_msgs/CameraInfo): RGB camera calibration and metadata.
Published Topics
depth_registered/camera_info (sensor_msgs/CameraInfo): Camera calibration and metadata. Same as rgb/camera_info but time-synced to depth_registered/image_rect.
depth_registered/image_rect (sensor_msgs/Image): Reprojected depth image in the RGB camera frame.
Parameters
depth_image_transport (string, default: raw): Image transport to use for depth subscriber.
use_rgb_timestamp (bool, default: false) : use timestamp of rgb image instead of depth image for the registered image.
fill_upsampling_holes (bool, default: false) : when RGB is higher res, interpolate by rasterizing depth triangles onto the registered image.
queue_size (int, default: 5): Size of message queue for synchronizing subscribed topics.
Required TF Transforms
/depth_optical_frame → /rgb_optical_frame: The transform between the depth and RGB camera optical frames as specified in the headers of the subscribed topics (rendered here as /depth_optical_frame and /rgb_optical_frame).