Defines the class of Scan matcher that uses Mote-Carlo method There is class MonteCarloScanMatcher derived from GridScanMatcher. Class contains virtual methods that should be overwritten. The main method consists of loop that estimates the best position of robot that fits to data from laser scan. More...
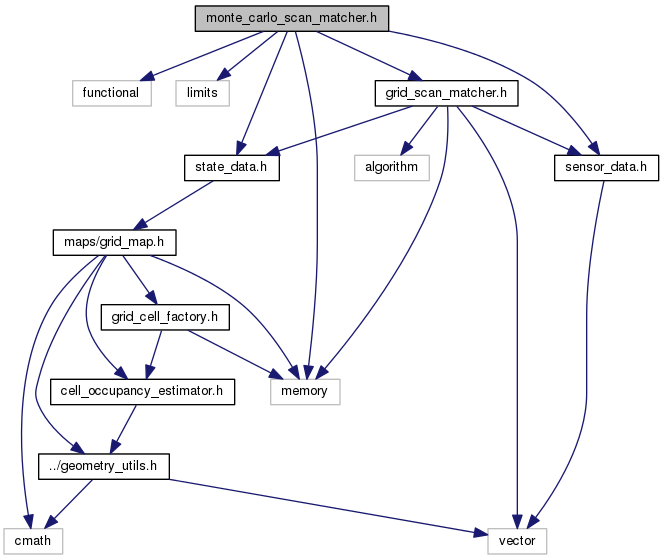
#include <functional>#include <limits>#include <memory>#include "state_data.h"#include "sensor_data.h"#include "grid_scan_matcher.h"
Include dependency graph for monte_carlo_scan_matcher.h:
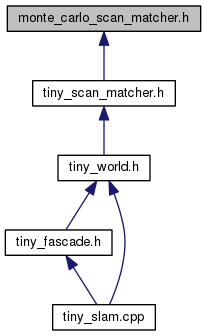
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | MonteCarloScanMatcher |
| Scan Matcher based on the Monte Carlo method. The focus of the scan matcher is to compare a scan and a built map; in this class the method of scan comparison is performed by comparing corresponding scan costs. More... | |
Detailed Description
Defines the class of Scan matcher that uses Mote-Carlo method There is class MonteCarloScanMatcher derived from GridScanMatcher. Class contains virtual methods that should be overwritten. The main method consists of loop that estimates the best position of robot that fits to data from laser scan.
Definition in file monte_carlo_scan_matcher.h.