Class encapsulated robot status message generation methods (either to or from a industrial::simple_message::SimpleMessage type. More...
#include <robot_status_message.h>
Public Member Functions | |
| unsigned int | byteLength () |
| Virtual method returns the object size when packed into a ByteArray. | |
| bool | init (industrial::simple_message::SimpleMessage &msg) |
| Initializes message from a simple message. | |
| void | init (industrial::robot_status::RobotStatus &status) |
| Initializes message from a robot status structure. | |
| void | init () |
| Initializes a new robot status message. | |
| bool | load (industrial::byte_array::ByteArray *buffer) |
| Virtual method for loading an object into a ByteArray. | |
| RobotStatusMessage (void) | |
| Default constructor. | |
| bool | unload (industrial::byte_array::ByteArray *buffer) |
| Virtual method for unloading an object from a ByteArray. | |
| ~RobotStatusMessage (void) | |
| Destructor. | |
Public Attributes | |
| industrial::robot_status::RobotStatus | status_ |
Detailed Description
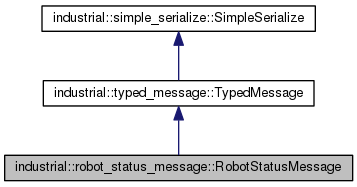
Class encapsulated robot status message generation methods (either to or from a industrial::simple_message::SimpleMessage type.
This message simply wraps the industrial::robot_status::RobotStatus data type. The data portion of this typed message matches RobotStatus.
THIS CLASS IS NOT THREAD-SAFE
Definition at line 66 of file robot_status_message.h.
Constructor & Destructor Documentation
Default constructor.
This method creates an empty message.
Definition at line 54 of file robot_status_message.cpp.
Destructor.
Definition at line 59 of file robot_status_message.cpp.
Member Function Documentation
| unsigned int industrial::robot_status_message::RobotStatusMessage::byteLength | ( | ) | [inline, virtual] |
Virtual method returns the object size when packed into a ByteArray.
- Returns:
- object size (in bytes)
Implements industrial::simple_serialize::SimpleSerialize.
Definition at line 109 of file robot_status_message.h.
| bool industrial::robot_status_message::RobotStatusMessage::init | ( | industrial::simple_message::SimpleMessage & | msg | ) | [virtual] |
Initializes message from a simple message.
- Parameters:
-
simple message to construct from
- Returns:
- true if message successfully initialized, otherwise false
Implements industrial::typed_message::TypedMessage.
Definition at line 64 of file robot_status_message.cpp.
| void industrial::robot_status_message::RobotStatusMessage::init | ( | industrial::robot_status::RobotStatus & | status | ) |
Initializes message from a robot status structure.
- Parameters:
-
status strcutre to initialize from
Definition at line 82 of file robot_status_message.cpp.
| void industrial::robot_status_message::RobotStatusMessage::init | ( | ) | [virtual] |
Initializes a new robot status message.
Implements industrial::typed_message::TypedMessage.
Definition at line 88 of file robot_status_message.cpp.
| bool industrial::robot_status_message::RobotStatusMessage::load | ( | industrial::byte_array::ByteArray * | buffer | ) | [virtual] |
Virtual method for loading an object into a ByteArray.
This method should load all the required data to reconstruct the class object into the buffer
- Parameters:
-
buffer pointer to ByteArray
- Returns:
- true on success, false otherwise (buffer not large enough)
Implements industrial::simple_serialize::SimpleSerialize.
Definition at line 94 of file robot_status_message.cpp.
| bool industrial::robot_status_message::RobotStatusMessage::unload | ( | industrial::byte_array::ByteArray * | buffer | ) | [virtual] |
Virtual method for unloading an object from a ByteArray.
This method should unload all the required data to reconstruct the class object (in place)
- Parameters:
-
buffer pointer to ByteArray
- Returns:
- true on success, false otherwise (buffer not large enough)
Implements industrial::simple_serialize::SimpleSerialize.
Definition at line 110 of file robot_status_message.cpp.
Member Data Documentation
Definition at line 115 of file robot_status_message.h.
The documentation for this class was generated from the following files: