Classes |
| union | icl_hardware::canopen_schunk::ds402::Controlword |
| | data union for access to DSP 402 6040 controlword, More...
|
| struct | icl_hardware::canopen_schunk::ds402::Controlword_ |
| | bit field for DSP 402 6040 controlword, More...
|
| struct | icl_hardware::canopen_schunk::ds402::HomingModeConfiguration |
| | Configuration parameters for a Homing_Mode according to CiA DSP-402 V1.1 section 13.2.1. More...
|
| struct | icl_hardware::canopen_schunk::ds402::ProfilePositionModeConfiguration |
| | Configuration parameters for a Profile_Position_Mode according to CiA DSP-402 V1.1 section 12.2.1. More...
|
| struct | icl_hardware::canopen_schunk::ds402::ProfileTorqueModeConfiguration |
| | Configuration parameters for a Profile_Torque_Mode according to CiA DSP-402 V1.1 section 17.2.1. More...
|
| struct | icl_hardware::canopen_schunk::ds402::ProfileVelocityModeConfiguration |
| | Configuration parameters for a Profile_Velocity_Mode according to CiA DSP-402 V1.1 section 16.2.1. More...
|
| union | icl_hardware::canopen_schunk::ds402::Statusword |
| | data union for access to DSP 402 6041 statusword, More...
|
| struct | icl_hardware::canopen_schunk::ds402::Statusword_ |
| | bit field for DSP 402 6041 statusword, More...
|
| union | icl_hardware::canopen_schunk::ds402::SupportedDriveModes |
| | data union for access to DSP 402 6041 statusword, More...
|
| struct | icl_hardware::canopen_schunk::ds402::SupportedDriveModes_ |
Namespaces |
| namespace | icl_hardware |
| namespace | icl_hardware::canopen_schunk |
| namespace | icl_hardware::canopen_schunk::ds402 |
Enumerations |
| enum | icl_hardware::canopen_schunk::ds402::eModeOfOperation {
icl_hardware::canopen_schunk::ds402::MOO_RESERVED_0 = 0,
icl_hardware::canopen_schunk::ds402::MOO_PROFILE_POSITION_MODE = 1,
icl_hardware::canopen_schunk::ds402::MOO_VELOCITY_MODE = 2,
icl_hardware::canopen_schunk::ds402::MOO_PROFILE_VELOCITY_MODE = 3,
icl_hardware::canopen_schunk::ds402::MOO_PROFILE_TORQUE_MODE = 4,
icl_hardware::canopen_schunk::ds402::MOO_RESERVED_1 = 5,
icl_hardware::canopen_schunk::ds402::MOO_HOMING_MODE = 6,
icl_hardware::canopen_schunk::ds402::MOO_INTERPOLATED_POSITION_MODE = 7,
icl_hardware::canopen_schunk::ds402::MOO_CYCLIC_SYNC_POSITION_MODE = 8,
icl_hardware::canopen_schunk::ds402::MOO_CYCLIC_SYNC_VELOCITY_MODE = 9,
icl_hardware::canopen_schunk::ds402::MOO_CYCLIC_SYNC_TORQUE_MODE = 10
} |
| enum | icl_hardware::canopen_schunk::ds402::eState {
icl_hardware::canopen_schunk::ds402::STATE_START,
icl_hardware::canopen_schunk::ds402::STATE_NOT_READY_TO_SWITCH_ON,
icl_hardware::canopen_schunk::ds402::STATE_SWITCH_ON_DISABLED,
icl_hardware::canopen_schunk::ds402::STATE_READY_TO_SWITCH_ON,
icl_hardware::canopen_schunk::ds402::STATE_SWITCHED_ON,
icl_hardware::canopen_schunk::ds402::STATE_OPERATION_ENABLE,
icl_hardware::canopen_schunk::ds402::STATE_QUICKSTOP_ACTIVE,
icl_hardware::canopen_schunk::ds402::STATE_FAULT_REACTION_ACTIVE,
icl_hardware::canopen_schunk::ds402::STATE_FAULT
} |
| | DS402 states as described in Figure 6.3 in ELMO DS402 implementation guide V1.000. More...
|
| enum | icl_hardware::canopen_schunk::ds402::eStateTransission {
icl_hardware::canopen_schunk::ds402::STATE_TRANS_INITIALIZE = 1,
icl_hardware::canopen_schunk::ds402::STATE_TRANS_SHUTDOWN = 2,
icl_hardware::canopen_schunk::ds402::STATE_TRANS_SWITCH_ON = 3,
icl_hardware::canopen_schunk::ds402::STATE_TRANS_ENABLE_OPERATION = 4,
icl_hardware::canopen_schunk::ds402::STATE_TRANS_QUICK_STOP = 11,
icl_hardware::canopen_schunk::ds402::STATE_TRANS_FAULT_RESET = 15
} |
Functions |
| std::string | icl_hardware::canopen_schunk::ds402::deviceStatusString (const eState state) |
| | Turns a status word into a status string according to the elmo DS-402 implementation guide chapter 6.6.1.
|
| std::string | icl_hardware::canopen_schunk::ds402::operationModeString (const eModeOfOperation mode) |
| eState | icl_hardware::canopen_schunk::ds402::stateFromStatusword (const ds402::Statusword &statusword) |
Variables |
| static const uint16_t | icl_hardware::canopen_schunk::ds402::ID_CONTROL_WORD = 0x6040 |
| static const uint16_t | icl_hardware::canopen_schunk::ds402::ID_STATUS_WORD = 0x6041 |
- Author:
- Georg Heppner <heppner@fzi.de>
-
Felix Mauch <mauch@fzi.de>
- Date:
- 2015-10-1
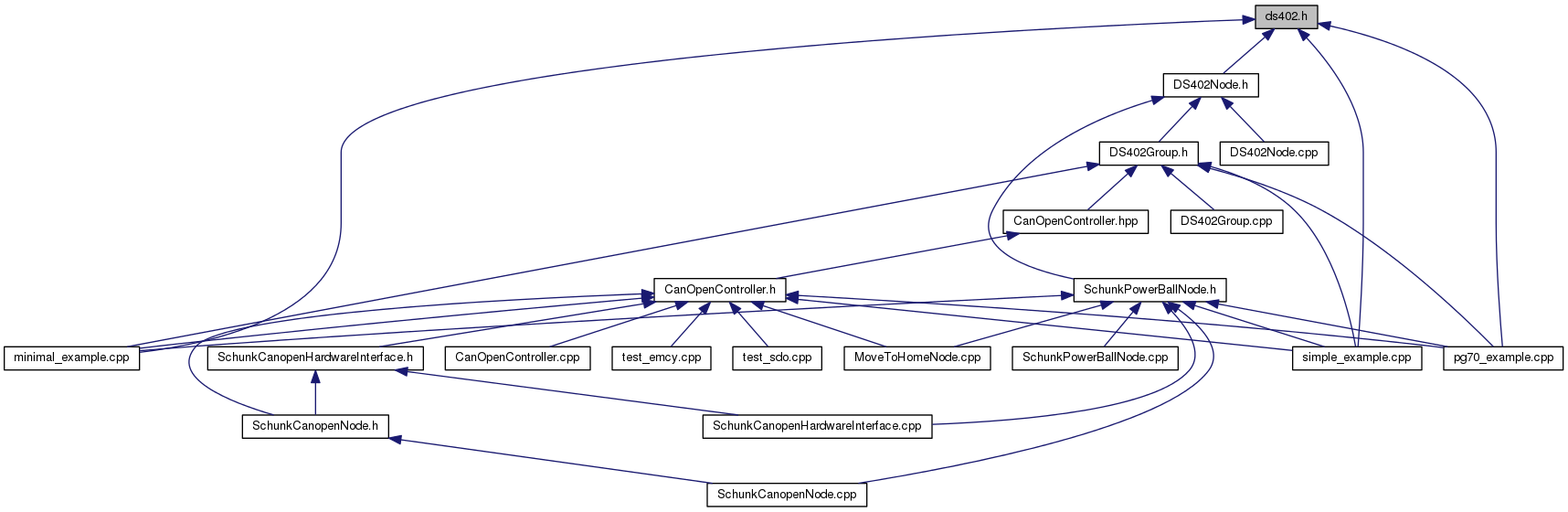
The ds402.h file contains common protocol information such as constants, enums and common helper functions for components working with the DS402 device protocol (canOpen protocol for motor drives) This includes data types for the status and control word that provide a central element for device configuration
Definition in file ds402.h.