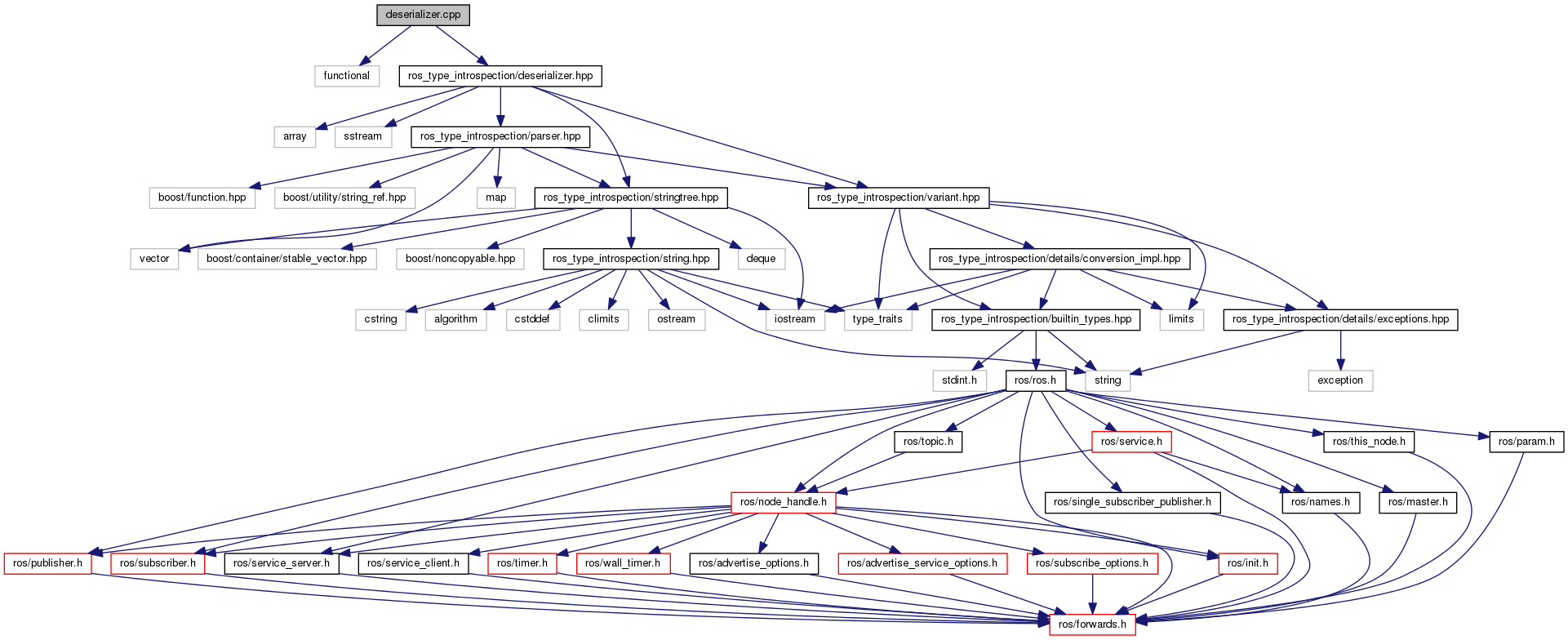
Include dependency graph for deserializer.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | RosIntrospection |
Functions | |
| void | RosIntrospection::buildRosFlatType (const ROSTypeList &type_map, ROSType type, SString prefix, uint8_t *buffer_ptr, ROSTypeFlat *flat_container_output, const uint32_t max_array_size) |
| buildRosFlatType is a function that read raw serialized data from a ROS message (generated by a ros bag or a topic) and stored the values of each field in a "flat" container called ROSTypeFlat. For example if you apply this to [geometry_msgs/Pose](http://docs.ros.org/kinetic/api/geometry_msgs/html/msg/Pose.html) the vector ROSTypeFlat::value will contain the following pairs (where ... is the number of that field) : | |
| void | RosIntrospection::buildRosFlatTypeImpl (const ROSTypeList &type_list, const ROSType &type, StringTreeLeaf tree_node, uint8_t **buffer_ptr, ROSTypeFlat *flat_container, const uint32_t max_array_size, bool do_store) |