#include <novatel_gps_msgs/NovatelMessageHeader.h>#include <novatel_gps_msgs/NovatelExtendedSolutionStatus.h>#include <novatel_gps_msgs/NovatelSignalMask.h>#include <stdint.h>
Include dependency graph for parsing_utils.h:

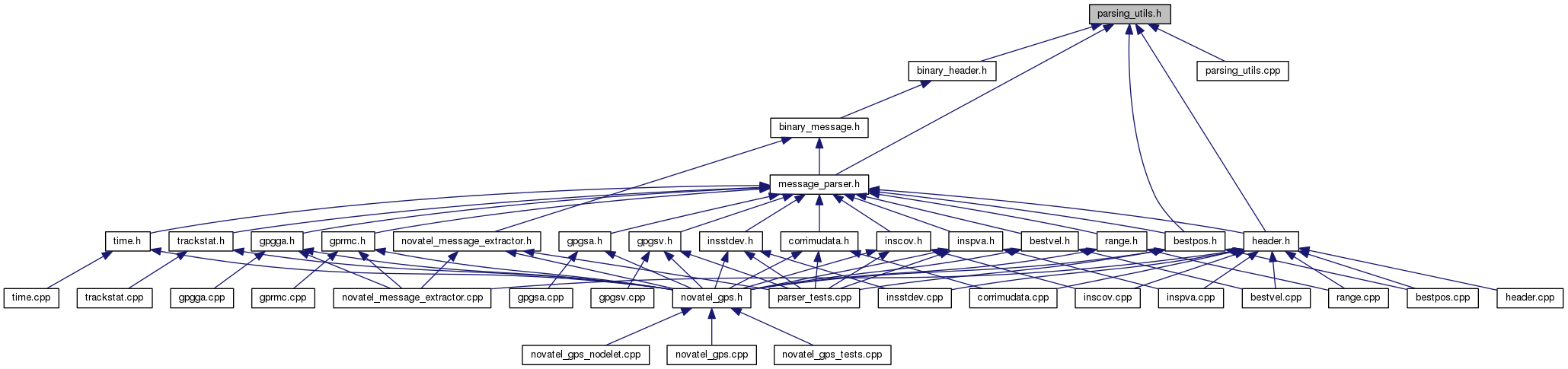
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | novatel_gps_driver |
Functions | |
| double | novatel_gps_driver::ConvertDmsToDegrees (double dms) |
| void | novatel_gps_driver::GetExtendedSolutionStatusMessage (uint32_t status, novatel_gps_msgs::NovatelExtendedSolutionStatus &msg) |
| void | novatel_gps_driver::GetNovatelReceiverStatusMessage (uint32_t status, novatel_gps_msgs::NovatelReceiverStatus &receiver_status_msg) |
| void | novatel_gps_driver::GetSignalsUsed (uint32_t mask, novatel_gps_msgs::NovatelSignalMask &msg) |
| double | novatel_gps_driver::ParseDouble (const uint8_t *buffer) |
| Converts a buffer containing 8 bytes into a double. | |
| bool | novatel_gps_driver::ParseDouble (const std::string &string, double &value) |
| Parses a string containing a floating-point number into a double. | |
| float | novatel_gps_driver::ParseFloat (const uint8_t *buffer) |
| Converts a buffer containing 4 bytes into a float. | |
| bool | novatel_gps_driver::ParseFloat (const std::string &string, float &value) |
| Parses a string containing a floating-point number into a float. | |
| int16_t | novatel_gps_driver::ParseInt16 (const uint8_t *buffer) |
| Converts a buffer containing 2 bytes into a signed 16-bit int. | |
| bool | novatel_gps_driver::ParseInt16 (const std::string &string, int16_t &value, int32_t base=10) |
| Parses a string containing an integer number into an int16_t. | |
| int32_t | novatel_gps_driver::ParseInt32 (const uint8_t *buffer) |
| Converts a buffer containing 4 bytes into a signed 32-bit int. | |
| bool | novatel_gps_driver::ParseInt32 (const std::string &string, int32_t &value, int32_t base=10) |
| Parses a string containing an integer number into an int32_t. | |
| uint16_t | novatel_gps_driver::ParseUInt16 (const uint8_t *buffer) |
| Converts a buffer containing 2 bytes into an unsigned 16-bit int. | |
| bool | novatel_gps_driver::ParseUInt16 (const std::string &string, uint16_t &value, int32_t base=10) |
| Parses a string containing an integer number into a uint16_t. | |
| uint32_t | novatel_gps_driver::ParseUInt32 (const uint8_t *buffer) |
| Converts a buffer containing 4 bytes into an unsigned 32-bit int. | |
| bool | novatel_gps_driver::ParseUInt32 (const std::string &string, uint32_t &value, int32_t base=10) |
| Parses a string containing an integer number into a uint32_t. | |
| bool | novatel_gps_driver::ParseUInt8 (const std::string &string, uint8_t &value, int32_t base=10) |
| Parses a string containing an integer number into a uint16_t. | |
| double | novatel_gps_driver::UtcFloatToSeconds (double utc_float) |
Variables | |
| const std::string | novatel_gps_driver::DATUMS [] |
| const size_t | novatel_gps_driver::MAX_DATUM = 86 |
| const size_t | novatel_gps_driver::MAX_POSITION_TYPE = 80 |
| const size_t | novatel_gps_driver::MAX_SOLUTION_STATUS = 22 |
| const size_t | novatel_gps_driver::NOVATEL_MESSAGE_HEADER_LENGTH = 10 |
| const std::string | novatel_gps_driver::PORT_IDENTIFIERS [] |
| const std::string | novatel_gps_driver::POSITION_TYPES [] |
| const std::string | novatel_gps_driver::SOLUTION_STATUSES [] |