#include <FlightController.hpp>
Include dependency graph for fcu_motor_test.cpp:
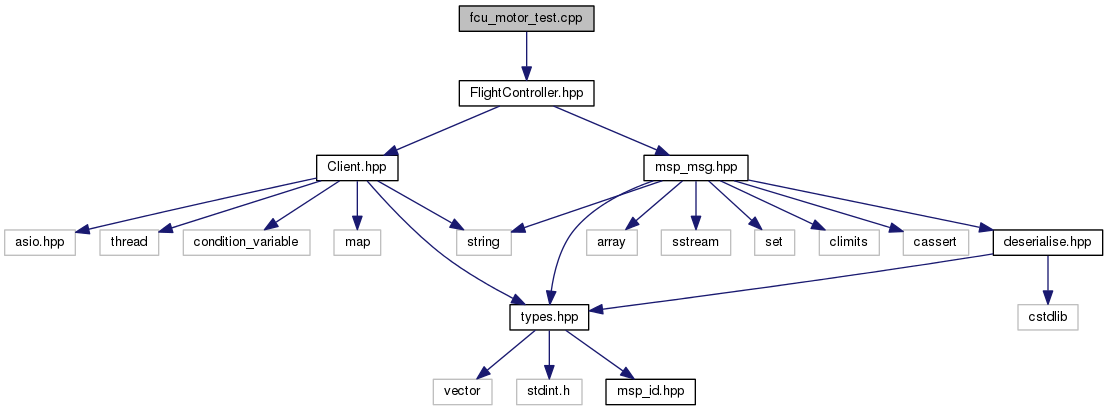
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Example for demonstrating direct motor access.
REMOVE YOUR PROPELLERS BEFORE EXECUTING THIS PROGRAM!
DYNBALANCE needs to be activated to gain direct access. (set "#define DYNBALANCE" in MultiWii's 'config.h')
The motor values are directly passed to the ESCs instead of computing them by RC commands. Hence, there is no need to arm or disarm the flight controller. In fact, it is not possible to control the motors by RC signals if DYNBALANCE is active.
Definition at line 17 of file fcu_motor_test.cpp.