#include <stewart.h>
Public Member Functions | |
| ReturnMatrix | Find_Alpha () |
| Return the angular acceleration of the platform. | |
| ReturnMatrix | Find_C (const Real Gravity=GRAVITY) |
| Return intermediate matrix C for the dynamics calculations. | |
| ReturnMatrix | Find_ddl () |
| Return the extension acceleration of the links in a vector. | |
| ReturnMatrix | Find_dl () |
| Return the extension rate of the links in a vector. | |
| ReturnMatrix | Find_h (const Real Gravity=GRAVITY) |
| Return the intermediate matrix corresponding to the Coriolis and centrifugal + gravity force/torque components. | |
| ReturnMatrix | Find_InvJacob1 () |
| Return the first intermediate jacobian matrix (reverse) of the platform. | |
| ReturnMatrix | Find_InvJacob2 () |
| Return the second intermediate jacobian matrix (reverse) of the platform. | |
| ReturnMatrix | Find_M () |
| Return the intermediate matrix corresponding to the inertia matrix of the machine. | |
| void | Find_Mc_Nc_Gc (Matrix &Mc, Matrix &Nc, Matrix &Gc) |
| Return(!) the intermediates matrix for forward dynamics with actuator dynamics. | |
| ReturnMatrix | Find_Omega () |
| Return the angular speed of the platform. | |
| ReturnMatrix | Find_wRp () |
| Return the rotation matrix wRp. | |
| ReturnMatrix | ForwardDyn (const ColumnVector Torque, const Real Gravity=GRAVITY) |
| Return the acceleration vector of the platform (ddq) | |
| ReturnMatrix | ForwardDyn_AD (const ColumnVector Command, const Real t) |
| Return the acceleration of the platform (Stewart platform mechanism dynamics including actuator dynamics) | |
| ReturnMatrix | ForwardKine (const ColumnVector guess_q, const ColumnVector l_given, const Real tolerance=0.001) |
| Return the position vector of the platform (vector q) | |
| ReturnMatrix | get_ddq () const |
| Return the acceleration of the platform. | |
| ReturnMatrix | get_dq () const |
| Return the speed of the platform. | |
| bool | get_Joint () const |
| Return the position of the universal joint (true if at base, false if at platform) | |
| Real | get_mp () const |
| Return the mass of the platform. | |
| ReturnMatrix | get_pIp () const |
| Return the inertia matrix of the platform. | |
| ReturnMatrix | get_pR () const |
| Return the postion of the center of mass of the platfom. | |
| ReturnMatrix | get_q () const |
| Return the position of the platform. | |
| ReturnMatrix | InvPosKine () |
| Return the lenght of the links in a vector. | |
| ReturnMatrix | jacobian () |
| Return the jacobian matrix of the platform. | |
| ReturnMatrix | jacobian_dot () |
| Return time deriative of the inverse jacobian matrix of the platform. | |
| ReturnMatrix | JointSpaceForceVct (const Real Gravity=GRAVITY) |
| Return a vector containing the six actuation force components. | |
| const Stewart & | operator= (const Stewart &x) |
| void | set_ddq (const ColumnVector _ddq) |
| Set the platform's acceleration. | |
| void | set_dq (const ColumnVector _dq) |
| Set the platform's speed. | |
| void | set_Joint (const bool _Joint) |
| Set the position of the universal joint on the links. | |
| void | set_mp (const Real _mp) |
| Set the mass of the platform. | |
| void | set_pIp (const Matrix _pIp) |
| Set the inertia matrix of the platform. | |
| void | set_pR (const ColumnVector _pR) |
| Set the position of the center of mass of the platform. | |
| void | set_q (const ColumnVector _q) |
| Set the position of the platform. | |
| Stewart () | |
| Default Constructor. | |
| Stewart (const Matrix InitPlat, bool Joint=true) | |
| Constructor. | |
| Stewart (const Stewart &x) | |
| Copy Constructor. | |
| Stewart (const std::string &filename, const std::string &PlatformName) | |
| ReturnMatrix | Torque (const Real Gravity=GRAVITY) |
| Return the torque vector of the platform. | |
| void | Transform () |
| Call the functions corresponding to the basic parameters when q changes. | |
| ~Stewart () | |
| Destructor. | |
Public Attributes | |
| ColumnVector | Alpha |
| Angular speed of the platform. | |
| ColumnVector | ddl |
| Acceleration of expension vector. | |
| ColumnVector | dl |
| Rate of expension vector. | |
| Matrix | IJ1 |
| Inverse of the first intermediate Jacobian matrix. | |
| Matrix | IJ2 |
| Inverse of the second intermediate Jacobian matrix. | |
| Matrix | Jacobian |
| Jacobian matrix. | |
| ColumnVector | Omega |
| Angular acceleration of the platform. | |
| Matrix | wRp |
| Rotation matrix describing the orientation of the platform. | |
Private Attributes | |
| Real | bm |
| Viscous damping coefficient of the motor. | |
| Real | bs |
| Viscous damping coefficient of the ballscrew. | |
| ColumnVector | ddq |
| Platform acceleration. | |
| ColumnVector | dq |
| Platform speed. | |
| ColumnVector | gravity |
| Gravity vector. | |
| Real | Jm |
| Moment of inertia (motor) | |
| Real | Js |
| Moment of inertia (ballscrew) | |
| Real | Kb |
| Motor back EMF. | |
| Real | Kt |
| Motor torque. | |
| Real | L |
| Motor Inductance. | |
| LinkStewart | Links [6] |
| Platform links. | |
| Real | mp |
| Platform mass. | |
| Real | n |
| Gear ratio (links motor) | |
| Real | p |
| Pitch of the ballscrew (links) | |
| Matrix | pIp |
| Platform Inertia (local ref.) | |
| ColumnVector | pR |
| Platform center of mass (in its own referential) | |
| ColumnVector | q |
| Platform position (xyz + euler angles) | |
| Real | R |
| Motor armature resistance. | |
| bool | UJointAtBase |
| Gives the position of the universal joint (true if at base, false if at platform) | |
Detailed Description
Constructor & Destructor Documentation
| Stewart::Stewart | ( | ) |
Default Constructor.
Definition at line 819 of file stewart.cpp.
| Stewart::Stewart | ( | const Matrix | InitPlatt, |
| bool | Joint = true |
||
| ) |
Constructor.
- Parameters:
-
InitPlatt,: Platform initialization matrix. Joint,: bool indicating where is the universal joint
Definition at line 853 of file stewart.cpp.
| Stewart::Stewart | ( | const Stewart & | x | ) |
Copy Constructor.
Definition at line 974 of file stewart.cpp.
| Stewart::Stewart | ( | const std::string & | filename, |
| const std::string & | PlatformName | ||
| ) |
Destructor.
Definition at line 999 of file stewart.cpp.
Member Function Documentation
| ReturnMatrix Stewart::Find_Alpha | ( | ) |
Return the angular acceleration of the platform.
Eq:

Where:
 are the three Euler angles of the platform.
are the three Euler angles of the platform. are the three Euler angle speed of the platform.
are the three Euler angle speed of the platform. are the three Euler angle acceleration of the platform.
are the three Euler angle acceleration of the platform.
Definition at line 1261 of file stewart.cpp.
| ReturnMatrix Stewart::Find_C | ( | const Real | Gravity = GRAVITY | ) |
Return intermediate matrix C for the dynamics calculations.
Eqs:




Where:
 is the acceleration of the platform center of mass.
is the acceleration of the platform center of mass. is the acceleration of the platform center (first three elements of the ddq vector).
is the acceleration of the platform center (first three elements of the ddq vector). is the angular acceleration of the platform.
is the angular acceleration of the platform. is the platform center of mass in the world referential.
is the platform center of mass in the world referential. is the angular speed of the platform.
is the angular speed of the platform. is the rotational matrix of the two referentials (world and platform).
is the rotational matrix of the two referentials (world and platform). is the vector of the center of mass of the platform with reference to the local frame (platform).
is the vector of the center of mass of the platform with reference to the local frame (platform). is the constant mass moments of inertia of the platform with reference to the local frame (platform).
is the constant mass moments of inertia of the platform with reference to the local frame (platform). is the mass of the platform.
is the mass of the platform.- G is the gravity.
 is the normal force transferred from the platform to the link.
is the normal force transferred from the platform to the link. is the constant mass moments of inertia of the platform in the world referential.
is the constant mass moments of inertia of the platform in the world referential. is the position of the attachment point of each link to the platform in the world referential.
is the position of the attachment point of each link to the platform in the world referential. is the moment transferred from the platform to the link (not present is the spherical joint is at the platform end).
is the moment transferred from the platform to the link (not present is the spherical joint is at the platform end).
Definition at line 1512 of file stewart.cpp.
| ReturnMatrix Stewart::Find_ddl | ( | ) |
Return the extension acceleration of the links in a vector.
Eq:

Where:
 is the inverse jacobian matrix of the platform
is the inverse jacobian matrix of the platform is the ddq vector
is the ddq vector
Definition at line 1472 of file stewart.cpp.
| ReturnMatrix Stewart::Find_dl | ( | ) |
Return the extension rate of the links in a vector.
Eq:

Where:
- is the inverse Jacobian matrix of the platform
 is the dq vector
is the dq vector
Definition at line 1451 of file stewart.cpp.
| ReturnMatrix Stewart::Find_h | ( | const Real | Gravity = GRAVITY | ) |
Return the intermediate matrix corresponding to the Coriolis and centrifugal + gravity force/torque components.
- Parameters:
-
Gravity,: Gravity (9.81)
h is found by setting the ddq vector to zero and then calling the torque routine. The vector returned by Torque() is equal to h.
Definition at line 1646 of file stewart.cpp.
| ReturnMatrix Stewart::Find_InvJacob1 | ( | ) |
Return the first intermediate jacobian matrix (reverse) of the platform.
Eq:
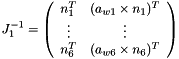
Where:
 to
to  are the unit vector of the links
are the unit vector of the links to
to  are the attachment point of the links to the platform in the world referential
are the attachment point of the links to the platform in the world referential
Definition at line 1316 of file stewart.cpp.
| ReturnMatrix Stewart::Find_InvJacob2 | ( | ) |
Return the second intermediate jacobian matrix (reverse) of the platform.
Eq:
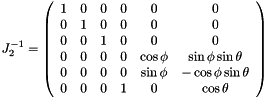
Where:
 and
and  are two of the euler angle of the platform (vector q)
are two of the euler angle of the platform (vector q)
Definition at line 1344 of file stewart.cpp.
| ReturnMatrix Stewart::Find_M | ( | ) |
Return the intermediate matrix corresponding to the inertia matrix of the machine.
M is found by setting the dq and Gravity vectors to zero and the ddq vector to zero except for the ith element that is set to one. Then, the ith row of M is equal to the matrix returned by Torque().
Definition at line 1663 of file stewart.cpp.
| void Stewart::Find_Mc_Nc_Gc | ( | Matrix & | Mc, |
| Matrix & | Nc, | ||
| Matrix & | Gc | ||
| ) |
Return(!) the intermediates matrix for forward dynamics with actuator dynamics.
- Parameters:
-
Mc,: Inertia matrix of the machine Nc,: Coriolis and centrifugal force/torque component Gc,: Gravity force/torque component
Eq:





 Where:
Where:
- p is the pitch of the ballscrew.
- n is the gear ratio.
 is the Identity matrix.
is the Identity matrix. is the mass moment of inertia of the ballscrew.
is the mass moment of inertia of the ballscrew. is the mass moment of inertia of the motor.
is the mass moment of inertia of the motor. is the viscous damping coefficient of the ballscrew.
is the viscous damping coefficient of the ballscrew. is the viscous damping coefficient of the motor.
is the viscous damping coefficient of the motor.- J is the Jacobian matrix of the platform.
Definition at line 1736 of file stewart.cpp.
| ReturnMatrix Stewart::Find_Omega | ( | ) |
Return the angular speed of the platform.
Eq:

Where:
- are the three Euler angles of the platform.
- are the three Euler angle speed of the platform.
Definition at line 1223 of file stewart.cpp.
| ReturnMatrix Stewart::Find_wRp | ( | ) |
Return the rotation matrix wRp.
Eq of the matrix:

Where:
 are the three Euler angles of the platform.
are the three Euler angles of the platform.
Definition at line 1186 of file stewart.cpp.
| ReturnMatrix Stewart::ForwardDyn | ( | const ColumnVector | T, |
| const Real | Gravity = GRAVITY |
||
| ) |
Return the acceleration vector of the platform (ddq)
- Parameters:
-
T,: torque vector Gravity,: Gravity (9.81)
Eq:

Where:
 is the torque vector.
is the torque vector.Definition at line 1701 of file stewart.cpp.
| ReturnMatrix Stewart::ForwardDyn_AD | ( | const ColumnVector | Command, |
| const Real | t | ||
| ) |
Return the acceleration of the platform (Stewart platform mechanism dynamics including actuator dynamics)
- Parameters:
-
Command,: Vector of the 6 motors voltages. t,: period of time use to find the currents (di/dt)
Voltages with back emf:

Currents:

Motor torque:

Platform acceleration:

Where:
- J is the Jacobian matrix of the platform.
- is the dq vector.
- p is the pitch of the ballscrew.
 is the motor back emf constant.
is the motor back emf constant.- L is the motor armature inductance.
- R is the motor armature resistance.
 is the motor torque constant.
is the motor torque constant. ,
,  and
and  are from Find_Mc_Nc_Gc().
are from Find_Mc_Nc_Gc().
Definition at line 1792 of file stewart.cpp.
| ReturnMatrix Stewart::ForwardKine | ( | const ColumnVector | guess_q, |
| const ColumnVector | l_given, | ||
| const Real | tolerance = 0.001 |
||
| ) |
Return the position vector of the platform (vector q)
- Parameters:
-
guess_q,: Approximation of real position l_given,: Lenght of the 6 links tolerance,: Ending criterion
The Newton-Raphson method is used to solve the forward kinematic problem. It is a numerical iterative technic that simplify the solution. An approximation of the answer has to be guess for this method to work.
Eq:

Where:
 is the position vector of the platform at the ith iteration.
is the position vector of the platform at the ith iteration. is the position vector of the platform at the (i-1)th iteration.
is the position vector of the platform at the (i-1)th iteration. is the Jacobian matrix of the platform at the position of the vector.
is the Jacobian matrix of the platform at the position of the vector. is the lenght vector of the links at the (i-1)th position of the platform.
is the lenght vector of the links at the (i-1)th position of the platform.- l is the real lenght vector of the links.
Definition at line 1567 of file stewart.cpp.
| ReturnMatrix Stewart::get_ddq | ( | ) | const |
Return the acceleration of the platform.
Definition at line 1125 of file stewart.cpp.
| ReturnMatrix Stewart::get_dq | ( | ) | const |
Return the speed of the platform.
Definition at line 1119 of file stewart.cpp.
| bool Stewart::get_Joint | ( | ) | const |
Return the position of the universal joint (true if at base, false if at platform)
Definition at line 1107 of file stewart.cpp.
| Real Stewart::get_mp | ( | ) | const |
Return the mass of the platform.
Definition at line 1143 of file stewart.cpp.
| ReturnMatrix Stewart::get_pIp | ( | ) | const |
Return the inertia matrix of the platform.
Definition at line 1137 of file stewart.cpp.
| ReturnMatrix Stewart::get_pR | ( | ) | const |
Return the postion of the center of mass of the platfom.
Definition at line 1131 of file stewart.cpp.
| ReturnMatrix Stewart::get_q | ( | void | ) | const |
Return the position of the platform.
Definition at line 1113 of file stewart.cpp.
| ReturnMatrix Stewart::InvPosKine | ( | ) |
Return the lenght of the links in a vector.
The goal of the inverse kinematic is to find the lenght of each of the six links from the position of the platform (X,Y,Z,  , , ).
, , ).
Definition at line 1429 of file stewart.cpp.
| ReturnMatrix Stewart::jacobian | ( | ) |
Return the jacobian matrix of the platform.
Eq:

Where:
 and
and  are intermediate matrix(Find_InvJacob1(), Find_InvJacob2())
are intermediate matrix(Find_InvJacob1(), Find_InvJacob2())
Definition at line 1290 of file stewart.cpp.
| ReturnMatrix Stewart::jacobian_dot | ( | ) |
Return time deriative of the inverse jacobian matrix of the platform.
Eq:


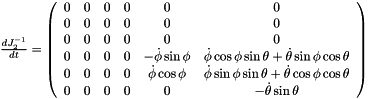
Where:
 is the angular speed vector of each link
is the angular speed vector of each link- n is the unit vector of the link
- is the angular speed vector of the platform
- is the position vector of the attachment point of the link to the platform
- and are two of the Euler angle (vector q)
 and
and  are two of the Euler angle speed (vector dq)
are two of the Euler angle speed (vector dq)
Definition at line 1389 of file stewart.cpp.
| ReturnMatrix Stewart::JointSpaceForceVct | ( | const Real | Gravity = GRAVITY | ) |
Return a vector containing the six actuation force components.
- Parameters:
-
Gravity,: Gravity (9.81)
See the description of LinkStewart::ActuationForce().
Definition at line 1595 of file stewart.cpp.
Overload = operator.
Definition at line 1004 of file stewart.cpp.
| void Stewart::set_ddq | ( | const ColumnVector | _ddq | ) |
Set the platform's acceleration.
Definition at line 1066 of file stewart.cpp.
| void Stewart::set_dq | ( | const ColumnVector | _dq | ) |
Set the platform's speed.
Definition at line 1048 of file stewart.cpp.
| void Stewart::set_Joint | ( | const bool | _Joint | ) |
Set the position of the universal joint on the links.
Definition at line 1030 of file stewart.cpp.
| void Stewart::set_mp | ( | const Real | _mp | ) |
Set the mass of the platform.
Definition at line 1101 of file stewart.cpp.
| void Stewart::set_pIp | ( | const Matrix | _pIp | ) |
Set the inertia matrix of the platform.
Definition at line 1092 of file stewart.cpp.
| void Stewart::set_pR | ( | const ColumnVector | _pR | ) |
Set the position of the center of mass of the platform.
Definition at line 1083 of file stewart.cpp.
| void Stewart::set_q | ( | const ColumnVector | _q | ) |
Set the position of the platform.
Definition at line 1036 of file stewart.cpp.
| ReturnMatrix Stewart::Torque | ( | const Real | Gravity = GRAVITY | ) |
Return the torque vector of the platform.
- Parameters:
-
Gravity,: Gravity (9.81)
Eq:

Where:
 is the Jacobian matrix of the platform.
is the Jacobian matrix of the platform.- F is the joint space force vector (JointSpaceForceVct()).
Definition at line 1625 of file stewart.cpp.
| void Stewart::Transform | ( | ) |
Call the functions corresponding to the basic parameters when q changes.
These functions are called by Transform:
Definition at line 1160 of file stewart.cpp.
Member Data Documentation
| ColumnVector Stewart::Alpha |
Real Stewart::bm [private] |
Real Stewart::bs [private] |
| ColumnVector Stewart::ddl |
ColumnVector Stewart::ddq [private] |
| ColumnVector Stewart::dl |
ColumnVector Stewart::dq [private] |
ColumnVector Stewart::gravity [private] |
| Matrix Stewart::IJ1 |
| Matrix Stewart::IJ2 |
| Matrix Stewart::Jacobian |
Real Stewart::Jm [private] |
Real Stewart::Js [private] |
Real Stewart::Kb [private] |
Real Stewart::Kt [private] |
Real Stewart::L [private] |
LinkStewart Stewart::Links[6] [private] |
Real Stewart::mp [private] |
Real Stewart::n [private] |
| ColumnVector Stewart::Omega |
Real Stewart::p [private] |
Matrix Stewart::pIp [private] |
ColumnVector Stewart::pR [private] |
ColumnVector Stewart::q [private] |
Real Stewart::R [private] |
bool Stewart::UJointAtBase [private] |
| Matrix Stewart::wRp |
The documentation for this class was generated from the following files: