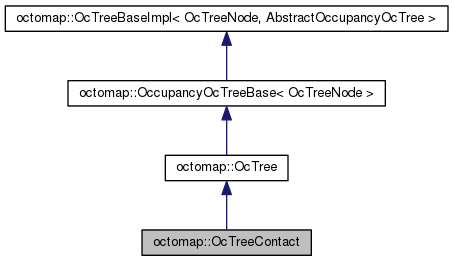
This is a inherited class of OcTree. The probability of contact sensor model is defined. More...
#include <OcTreeContact.h>
Public Member Functions | |
| double | getFreeThres () const |
| float | getFreeThresLog () const |
| double | getProbHitContactSensor () const |
| float | getProbHitContactSensorLog () const |
| double | getProbMissContactSensor () const |
| float | getProbMissContactSensorLog () const |
| bool | isNodeFree (const OcTreeNode *occupancy_node) const |
| bool | isNodeFree (const OcTreeNode &occupancy_node) const |
| bool | isNodeUnknown (const OcTreeNode *occupancy_node) const |
| bool | isNodeUnknown (const OcTreeNode &occupancy_node) const |
| OcTreeContact (double resolution) | |
| void | setFreeThres (double prob) |
| void | setProbHitContactSensor (double prob) |
| void | setProbMissContactSensor (double prob) |
Public Attributes | |
| float | free_prob_thres_log_ |
| float | prob_hit_contact_sensor_log_ |
| float | prob_miss_contact_sensor_log_ |
Detailed Description
This is a inherited class of OcTree. The probability of contact sensor model is defined.
Definition at line 48 of file OcTreeContact.h.
Constructor & Destructor Documentation
| octomap::OcTreeContact::OcTreeContact | ( | double | resolution | ) | [inline] |
Definition at line 80 of file OcTreeContact.h.
Member Function Documentation
| double octomap::OcTreeContact::getFreeThres | ( | ) | const [inline] |
Definition at line 68 of file OcTreeContact.h.
| float octomap::OcTreeContact::getFreeThresLog | ( | ) | const [inline] |
Definition at line 69 of file OcTreeContact.h.
| double octomap::OcTreeContact::getProbHitContactSensor | ( | ) | const [inline] |
Definition at line 71 of file OcTreeContact.h.
| float octomap::OcTreeContact::getProbHitContactSensorLog | ( | ) | const [inline] |
Definition at line 72 of file OcTreeContact.h.
| double octomap::OcTreeContact::getProbMissContactSensor | ( | ) | const [inline] |
Definition at line 73 of file OcTreeContact.h.
| float octomap::OcTreeContact::getProbMissContactSensorLog | ( | ) | const [inline] |
Definition at line 74 of file OcTreeContact.h.
| bool octomap::OcTreeContact::isNodeFree | ( | const OcTreeNode * | occupancy_node | ) | const [inline] |
Definition at line 51 of file OcTreeContact.h.
| bool octomap::OcTreeContact::isNodeFree | ( | const OcTreeNode & | occupancy_node | ) | const [inline] |
Definition at line 54 of file OcTreeContact.h.
| bool octomap::OcTreeContact::isNodeUnknown | ( | const OcTreeNode * | occupancy_node | ) | const [inline] |
Definition at line 57 of file OcTreeContact.h.
| bool octomap::OcTreeContact::isNodeUnknown | ( | const OcTreeNode & | occupancy_node | ) | const [inline] |
Definition at line 60 of file OcTreeContact.h.
| void octomap::OcTreeContact::setFreeThres | ( | double | prob | ) | [inline] |
Definition at line 64 of file OcTreeContact.h.
| void octomap::OcTreeContact::setProbHitContactSensor | ( | double | prob | ) | [inline] |
Definition at line 65 of file OcTreeContact.h.
| void octomap::OcTreeContact::setProbMissContactSensor | ( | double | prob | ) | [inline] |
Definition at line 66 of file OcTreeContact.h.
Member Data Documentation
Definition at line 78 of file OcTreeContact.h.
Definition at line 76 of file OcTreeContact.h.
Definition at line 77 of file OcTreeContact.h.
The documentation for this class was generated from the following file: