torque controller for single motor More...
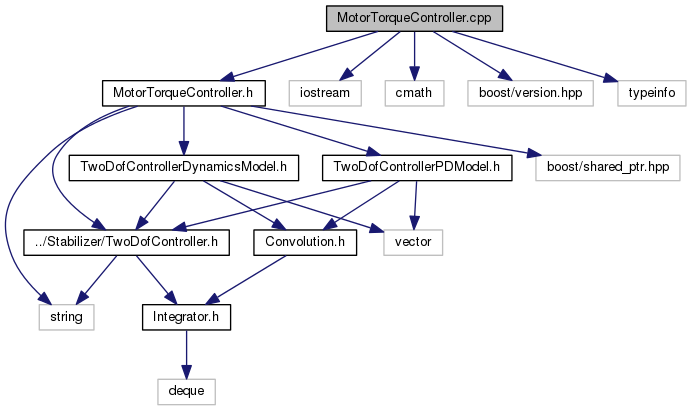
#include "MotorTorqueController.h"#include <iostream>#include <cmath>#include <boost/version.hpp>#include <typeinfo>
Include dependency graph for MotorTorqueController.cpp:
Go to the source code of this file.
Defines | |
| #define | DEFAULT_MIN_MAX_DQ 0.26 |
| #define | DEFAULT_MIN_MAX_TRANSITION_DQ (0.17 * m_dt) |
| #define | MAX_TRANSITION_COUNT (TRANSITION_TIME/m_dt) |
| #define | TORQUE_MARGIN 10.0 |
| #define | TRANSITION_TIME 2.0 |
Detailed Description
Define Documentation
| #define DEFAULT_MIN_MAX_DQ 0.26 |
Definition at line 24 of file MotorTorqueController.cpp.
| #define DEFAULT_MIN_MAX_TRANSITION_DQ (0.17 * m_dt) |
Definition at line 25 of file MotorTorqueController.cpp.
| #define MAX_TRANSITION_COUNT (TRANSITION_TIME/m_dt) |
Definition at line 22 of file MotorTorqueController.cpp.
| #define TORQUE_MARGIN 10.0 |
Definition at line 23 of file MotorTorqueController.cpp.
| #define TRANSITION_TIME 2.0 |
Definition at line 21 of file MotorTorqueController.cpp.