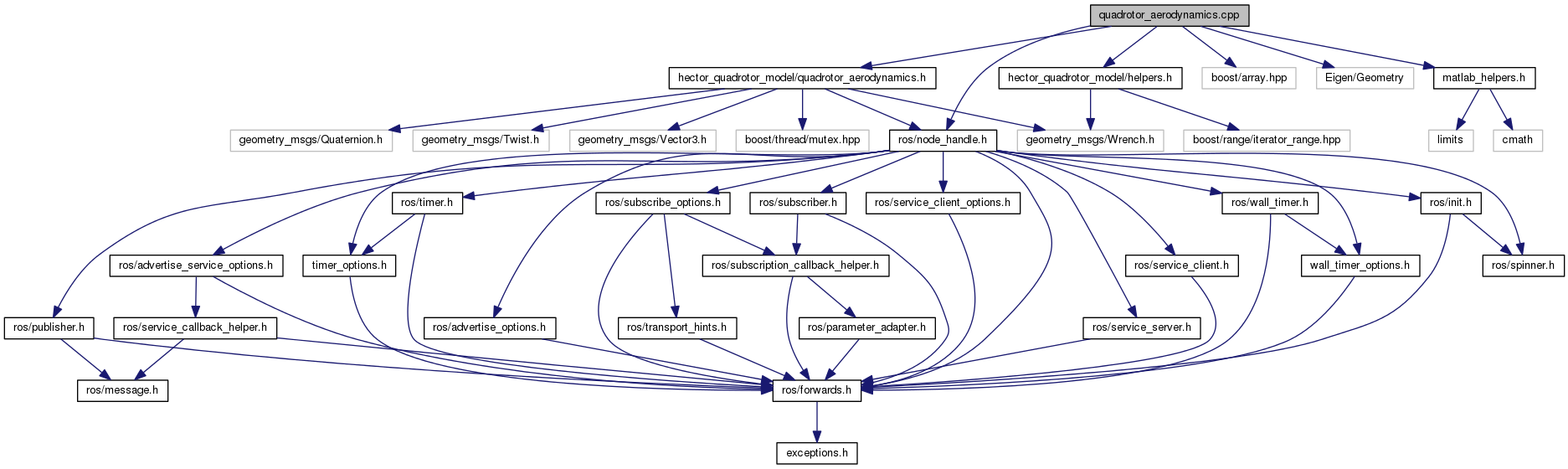
#include <hector_quadrotor_model/quadrotor_aerodynamics.h>#include <hector_quadrotor_model/helpers.h>#include <ros/node_handle.h>#include <boost/array.hpp>#include <Eigen/Geometry>#include "matlab_helpers.h"
Include dependency graph for quadrotor_aerodynamics.cpp:
Go to the source code of this file.
Classes | |
| struct | hector_quadrotor_model::QuadrotorAerodynamics::DragModel |
| struct | hector_quadrotor_model::DragParameters |
Namespaces | |
| namespace | hector_quadrotor_model |
Functions | |
| void | hector_quadrotor_model::quadrotorDrag (const real_T uin[6], const DragParameters parameter, real_T dt, real_T y[6]) |