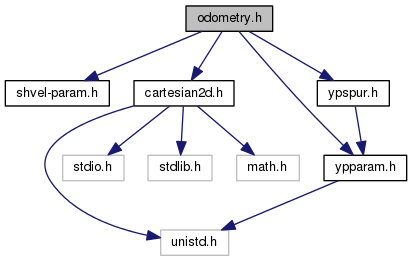
Include dependency graph for odometry.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | _error_state |
| struct | _odometry |
Typedefs | |
| typedef struct _error_state | ErrorState |
| typedef struct _error_state * | ErrorStatePtr |
| typedef struct _odometry | Odometry |
| typedef struct _odometry * | OdometryPtr |
Functions | |
| void | cs_odometry (YPSpur_cs cs, OdometryPtr dst_odm) |
| void | cstrans_odometry (YPSpur_cs cs, OdometryPtr dst_odm) |
| void | cstrans_xy (YPSpur_cs src, YPSpur_cs dest, double *x, double *y, double *theta) |
| CSptr | get_cs_pointer (YPSpur_cs cs) |
| ErrorStatePtr | get_error_state_ptr () |
| OdometryPtr | get_odometry_ptr () |
| void | init_coordinate_systems (void) |
| void | init_odometry (void) |
| void | odm_logging (OdometryPtr, double, double) |
| int | odm_read (OdometryPtr odm, double *v, double *w) |
| void | odometry (OdometryPtr xp, short *cnt, short *pwm, double dt, double time) |
| int | odometry_receive_loop (void) |
| void | process_int (OdometryPtr xp, ErrorStatePtr err, int param_id, int id, int value, double receive_time) |
| void | set_cs (YPSpur_cs cs, double x, double y, double theta) |
| double | time_estimate (int readnum) |
| 時刻の推定 (n回目の計測結果の時刻を計算する) | |
Typedef Documentation
| typedef struct _error_state ErrorState |
| typedef struct _error_state* ErrorStatePtr |
Definition at line 48 of file odometry.h.
| typedef struct _odometry* OdometryPtr |
Definition at line 30 of file odometry.h.
Function Documentation
| void cs_odometry | ( | YPSpur_cs | cs, |
| OdometryPtr | dst_odm | ||
| ) |
| void cstrans_odometry | ( | YPSpur_cs | cs, |
| OdometryPtr | dst_odm | ||
| ) |
Definition at line 316 of file odometry.c.
| void cstrans_xy | ( | YPSpur_cs | src, |
| YPSpur_cs | dest, | ||
| double * | x, | ||
| double * | y, | ||
| double * | theta | ||
| ) |
Definition at line 131 of file odometry.c.
| CSptr get_cs_pointer | ( | YPSpur_cs | cs | ) |
Definition at line 102 of file odometry.c.
Definition at line 337 of file odometry.c.
Definition at line 332 of file odometry.c.
| void init_coordinate_systems | ( | void | ) |
Definition at line 69 of file odometry.c.
| void init_odometry | ( | void | ) |
Definition at line 80 of file odometry.c.
| void odm_logging | ( | OdometryPtr | , |
| double | , | ||
| double | |||
| ) |
| int odm_read | ( | OdometryPtr | odm, |
| double * | v, | ||
| double * | w | ||
| ) |
| void odometry | ( | OdometryPtr | xp, |
| short * | cnt, | ||
| short * | pwm, | ||
| double | dt, | ||
| double | time | ||
| ) |
Definition at line 144 of file odometry.c.
| int odometry_receive_loop | ( | void | ) |
Definition at line 585 of file odometry.c.
| void process_int | ( | OdometryPtr | xp, |
| ErrorStatePtr | err, | ||
| int | param_id, | ||
| int | id, | ||
| int | value, | ||
| double | receive_time | ||
| ) |
Definition at line 247 of file odometry.c.
Definition at line 138 of file odometry.c.
| double time_estimate | ( | int | readnum | ) |
時刻の推定 (n回目の計測結果の時刻を計算する)
- Parameters:
-
int readnum[in] : 計測回数
Definition at line 346 of file odometry.c.