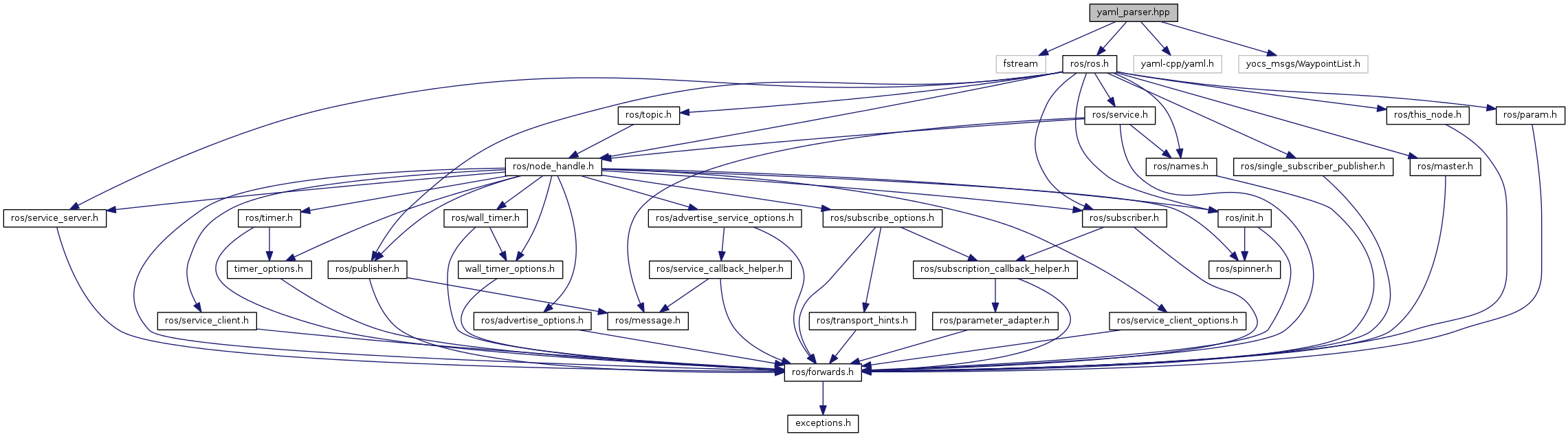
#include <fstream>#include <ros/ros.h>#include <yaml-cpp/yaml.h>#include <yocs_msgs/WaypointList.h>
Include dependency graph for yaml_parser.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | yocs |
Functions | |
| void | yocs::getYamlNode (const std::string &filename, YAML::Node &node) |
| bool | yocs::loadWaypointListFromYaml (const std::string &filename, yocs_msgs::WaypointList &wps) |
| void | yocs::parseWaypoints (const YAML::Node &node, yocs_msgs::WaypointList &wps) |