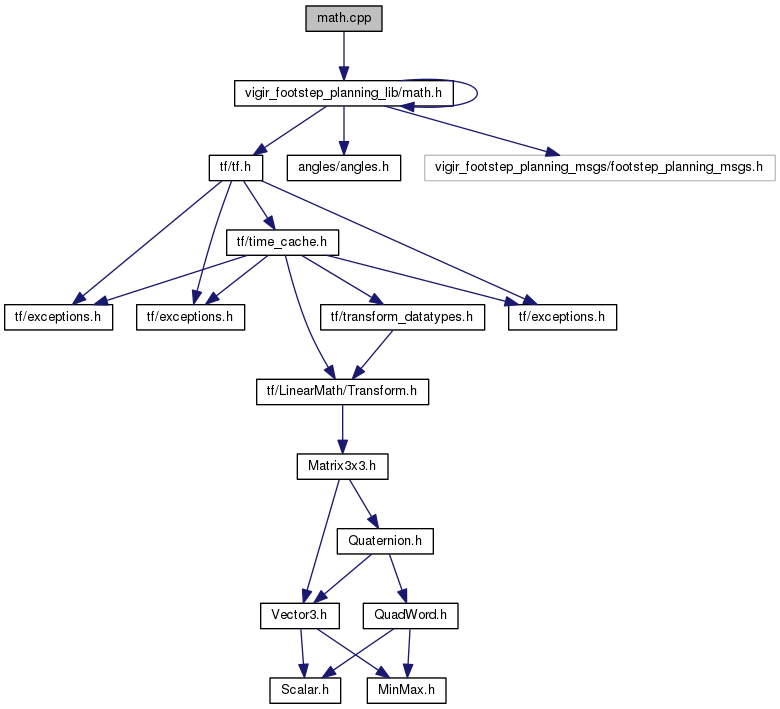
#include <vigir_footstep_planning_lib/math.h>
Include dependency graph for math.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | vigir_footstep_planning |
Functions | |
| void | vigir_footstep_planning::getDeltaStep (const msgs::Foot ¤t, const msgs::Foot &next, geometry_msgs::Pose &dstep) |
| void | vigir_footstep_planning::getDeltaStep (const tf::Pose ¤t, const tf::Pose &next, tf::Pose &dstep) |
| void | vigir_footstep_planning::normalToQuaternion (const geometry_msgs::Vector3 &n, double yaw, geometry_msgs::Quaternion &q) |
| void | vigir_footstep_planning::normalToRP (const geometry_msgs::Vector3 &n, double yaw, double &r, double &p) |
| bool | vigir_footstep_planning::pointWithinPolygon (int x, int y, const std::vector< std::pair< int, int > > &edges) |
| Crossing number method to determine whether a point lies within a polygon or not. | |
| void | vigir_footstep_planning::quaternionToNormal (const geometry_msgs::Quaternion &q, geometry_msgs::Vector3 &n) |
| void | vigir_footstep_planning::quaternionToNormalYaw (const geometry_msgs::Quaternion &q, geometry_msgs::Vector3 &n, double &yaw) |
| void | vigir_footstep_planning::RPYToNormal (double r, double p, double y, geometry_msgs::Vector3 &n) |