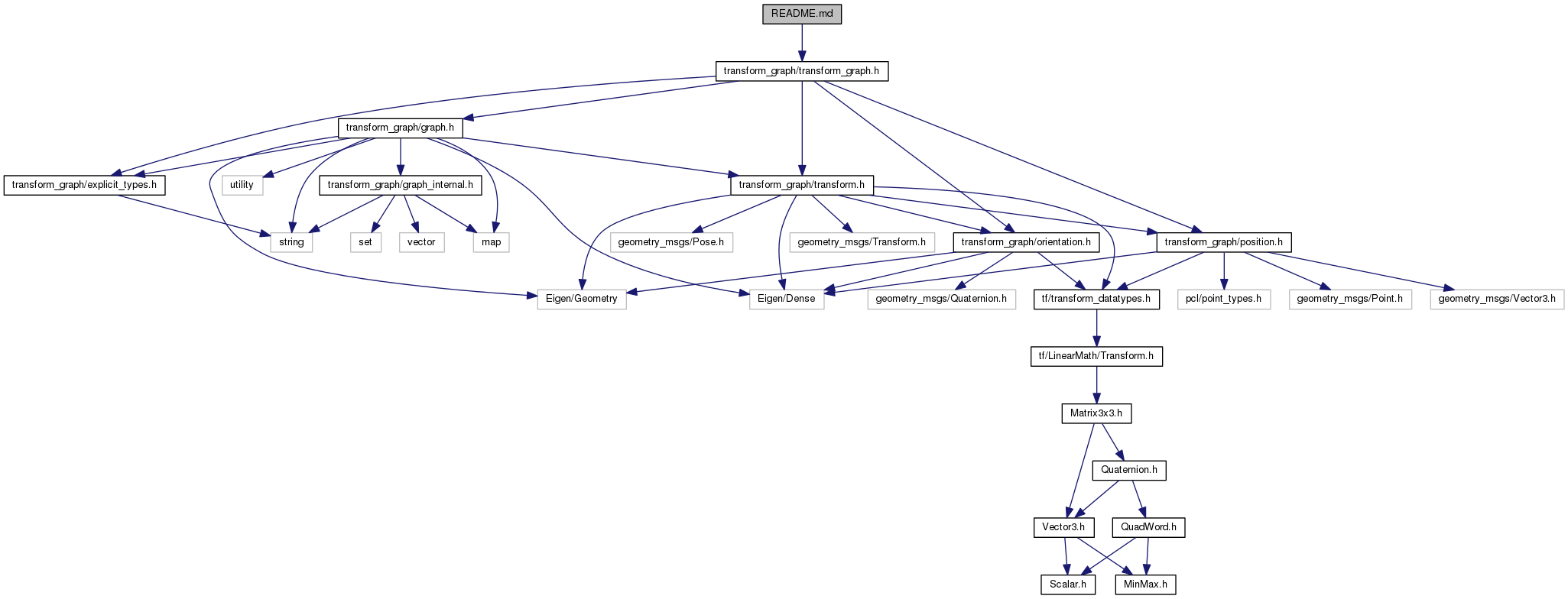
#include "transform_graph/transform_graph.h"
Include dependency graph for README.md:
Go to the source code of this file.
Functions | |
| graph | Add ("wrist", transform_graph::RefFrame("base_link"), wrist_pose_stamped) |
| graph | Add ("kinect", transform_graph::RefFrame("base_link"), kinect_pose_stamped) |
| graph | DescribePosition (point_in_kinect, transform_graph::Source("kinect"), transform_graph::Target("wrist"),&point_in_wrist) |
| if (point_in_wrist.vector().norm()< 0.05) | |
Variables | |
| https | __pad0__ |
| pcl::PointXYZ | point_in_kinect = ... |
| transform_graph::Position | point_in_wrist |
Function Documentation
| graph Add | ( | "wrist" | , |
| transform_graph:: | RefFrame"base_link", | ||
| wrist_pose_stamped | |||
| ) |
| graph Add | ( | "kinect" | , |
| transform_graph:: | RefFrame"base_link", | ||
| kinect_pose_stamped | |||
| ) |
| graph DescribePosition | ( | point_in_kinect | , |
| transform_graph:: | Source"kinect", | ||
| transform_graph:: | Target"wrist", | ||
| & | point_in_wrist | ||
| ) |
Variable Documentation
| pcl::PointXYZ point_in_kinect = ... |