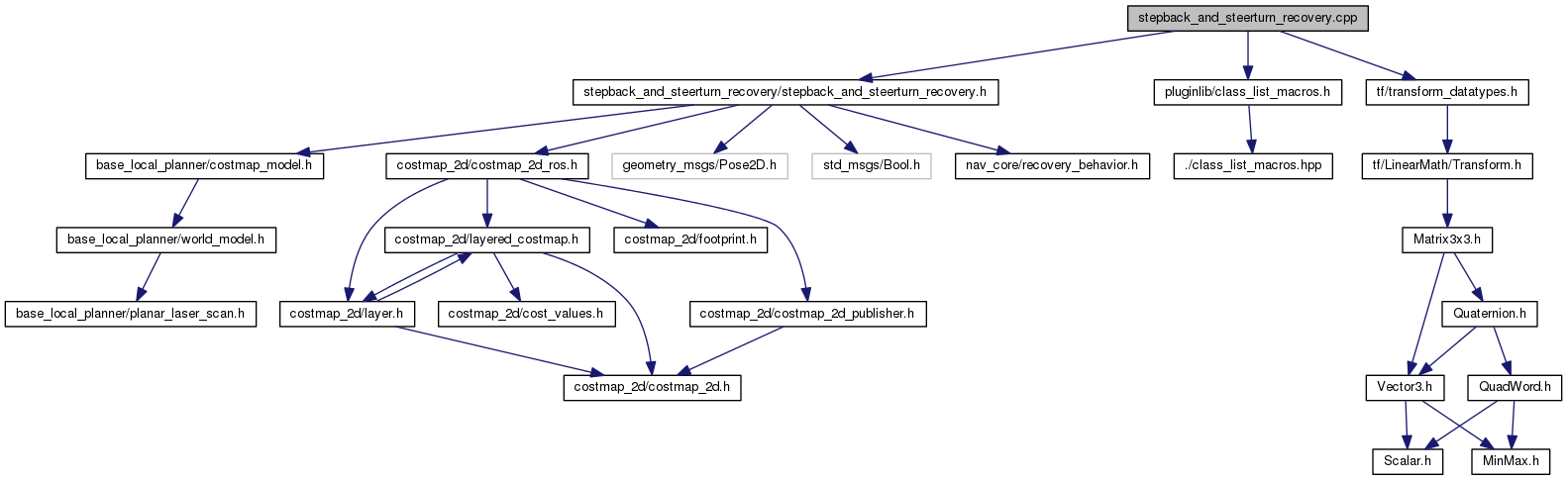
#include <stepback_and_steerturn_recovery/stepback_and_steerturn_recovery.h>#include <pluginlib/class_list_macros.h>#include <tf/transform_datatypes.h>
Include dependency graph for stepback_and_steerturn_recovery.cpp:
Go to the source code of this file.
Functions | |
| PLUGINLIB_DECLARE_CLASS (stepback_and_steerturn_recovery, StepBackAndSteerTurnRecovery, stepback_and_steerturn_recovery::StepBackAndSteerTurnRecovery, nav_core::RecoveryBehavior) namespace stepback_and_steerturn_recovery | |
Function Documentation
| PLUGINLIB_DECLARE_CLASS | ( | stepback_and_steerturn_recovery | , |
| StepBackAndSteerTurnRecovery | , | ||
| stepback_and_steerturn_recovery::StepBackAndSteerTurnRecovery | , | ||
| nav_core::RecoveryBehavior | |||
| ) |
Return the cost of a pose, modified so that -1 does not equal infinity; instead 1e9 does.
Return the maximum d <= duration_ such that starting at the current pose, the cost is nonincreasing for d seconds if we follow twist It might also be good to have a threshold such that we're allowed to have lethal cost for at most the first k of those d seconds, but this is not done
Definition at line 40 of file stepback_and_steerturn_recovery.cpp.