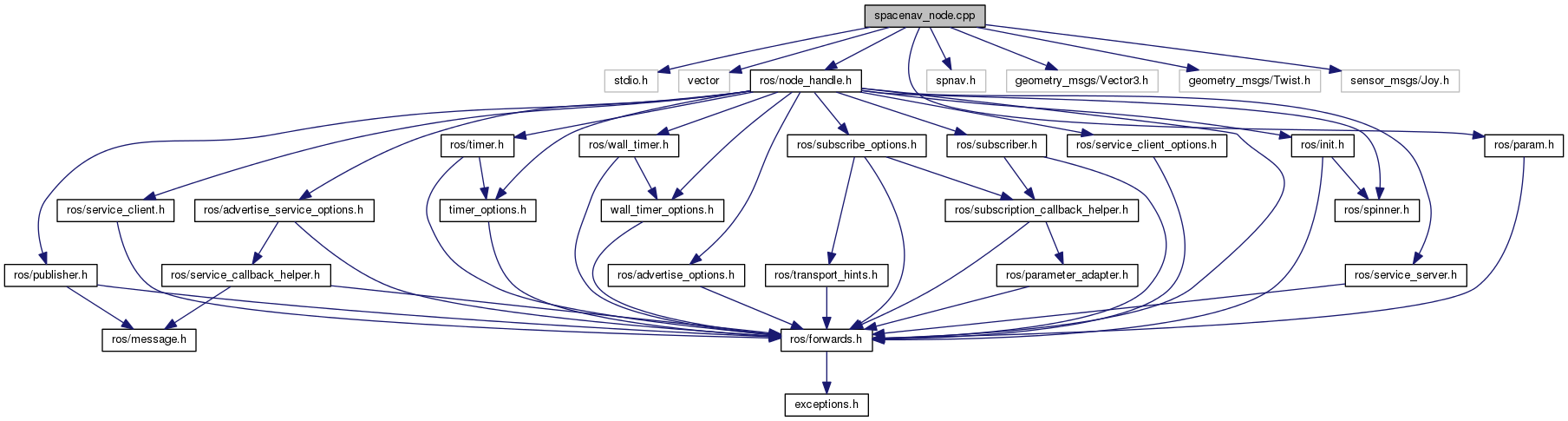
#include <stdio.h>#include <vector>#include "ros/node_handle.h"#include "ros/param.h"#include "spnav.h"#include "geometry_msgs/Vector3.h"#include "geometry_msgs/Twist.h"#include "sensor_msgs/Joy.h"
Include dependency graph for spacenav_node.cpp:
Go to the source code of this file.
Functions | |
| bool | ensureThreeComponents (std::vector< double > ¶m) |
| int | main (int argc, char **argv) |
Function Documentation
| bool ensureThreeComponents | ( | std::vector< double > & | param | ) |
Ensure that the vector parameter has three components.
Used for linear_scale and angular_scale. If the parameter has one component, this value is copied as second and third components.
- Returns:
- True if the parameter was set correctly.
Definition at line 50 of file spacenav_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 72 of file spacenav_node.cpp.