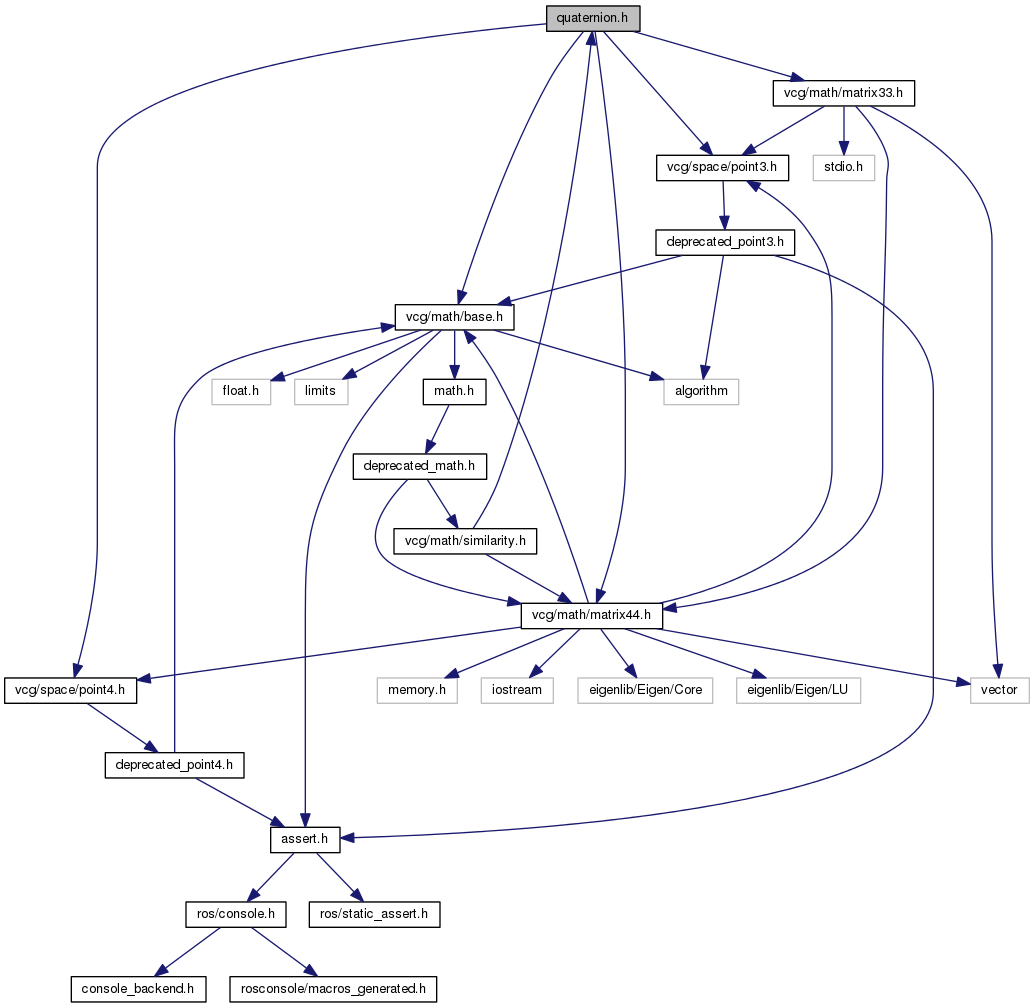
#include <vcg/space/point3.h>#include <vcg/space/point4.h>#include <vcg/math/base.h>#include <vcg/math/matrix44.h>#include <vcg/math/matrix33.h>
Include dependency graph for quaternion.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | vcg::Quaternion< S > |
Namespaces | |
| namespace | vcg |
* | |
Defines | |
| #define | M(a, b, c, d) (2*(V(a)*V(b)-V(c)*V(d))) |
| #define | P(a, b, c, d) (2*(V(a)*V(b)+V(c)*V(d))) |
Typedefs | |
| typedef Quaternion< double > | vcg::Quaterniond |
| typedef Quaternion< float > | vcg::Quaternionf |
Functions | |
| template<class S > | |
| Quaternion< S > | vcg::Interpolate (Quaternion< S > a, Quaternion< S > b, double t) |
| template<class S > | |
| Quaternion< S > | vcg::Inverse (const Quaternion< S > &q) |
| template<class S > | |
| Quaternion< S > & | vcg::Invert (Quaternion< S > &q) |
| template<class S , class M > | |
| void | vcg::MatrixToQuaternion (const M &m, Quaternion< S > &q) |
| template<class S , class M > | |
| void | vcg::QuaternionToMatrix (const Quaternion< S > &q, M &m) |