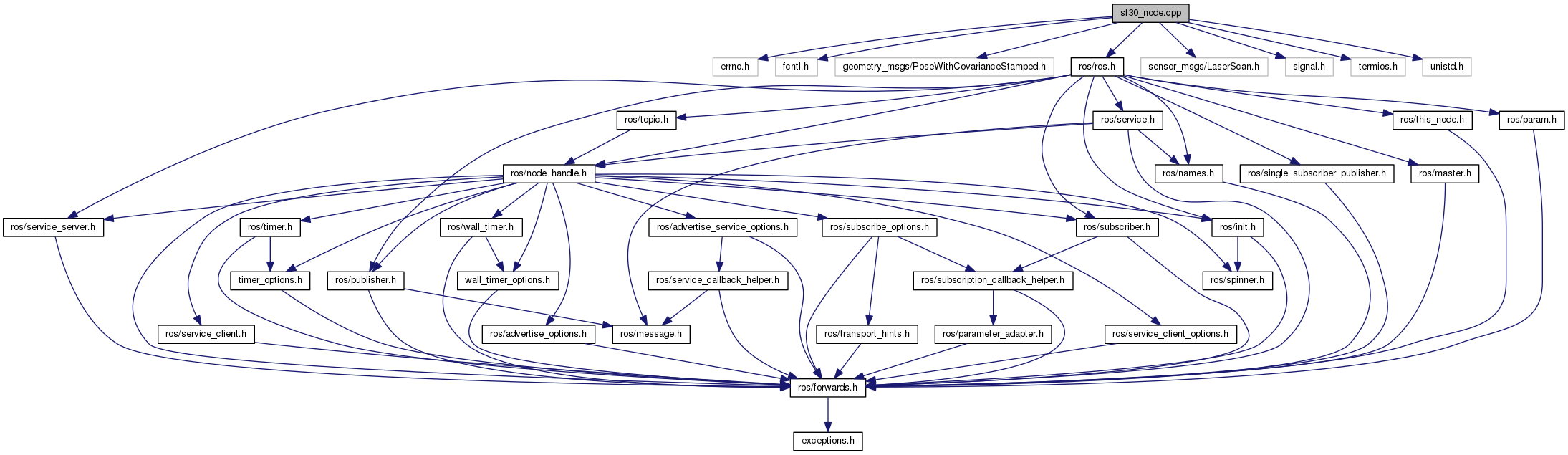
#include <errno.h>#include <fcntl.h>#include <geometry_msgs/PoseWithCovarianceStamped.h>#include <ros/ros.h>#include <sensor_msgs/LaserScan.h>#include <signal.h>#include <termios.h>#include <unistd.h>
Include dependency graph for sf30_node.cpp:
Go to the source code of this file.
Functions | |
| bool | isValidNumber (char a) |
| int | main (int argc, char **argv) |
| void | set_blocking (int fd, int should_block) |
| int | set_interface_attribs (int fd, int speed, int parity) |
| void | SigintHandler (int sig) |
Variables | |
| bool | exit_ |
| int | fdes |
Function Documentation
| bool isValidNumber | ( | char | a | ) |
Definition at line 84 of file sf30_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 88 of file sf30_node.cpp.
| void set_blocking | ( | int | fd, |
| int | should_block | ||
| ) |
Definition at line 69 of file sf30_node.cpp.
| int set_interface_attribs | ( | int | fd, |
| int | speed, | ||
| int | parity | ||
| ) |
Definition at line 32 of file sf30_node.cpp.
| void SigintHandler | ( | int | sig | ) |
Definition at line 25 of file sf30_node.cpp.
Variable Documentation
| bool exit_ |
Definition at line 23 of file sf30_node.cpp.
| int fdes |
Definition at line 22 of file sf30_node.cpp.