#include <driver_svh/ImportExport.h>#include <driver_svh/SVHSerialInterface.h>#include <driver_svh/SVHReceiveThread.h>#include <driver_svh/SVHControlCommand.h>#include <driver_svh/SVHControllerFeedback.h>#include <driver_svh/SVHCurrentSettings.h>#include <driver_svh/SVHFirmwareInfo.h>#include <driver_svh/SVHPositionSettings.h>#include <driver_svh/SVHControllerState.h>#include <driver_svh/SVHEncoderSettings.h>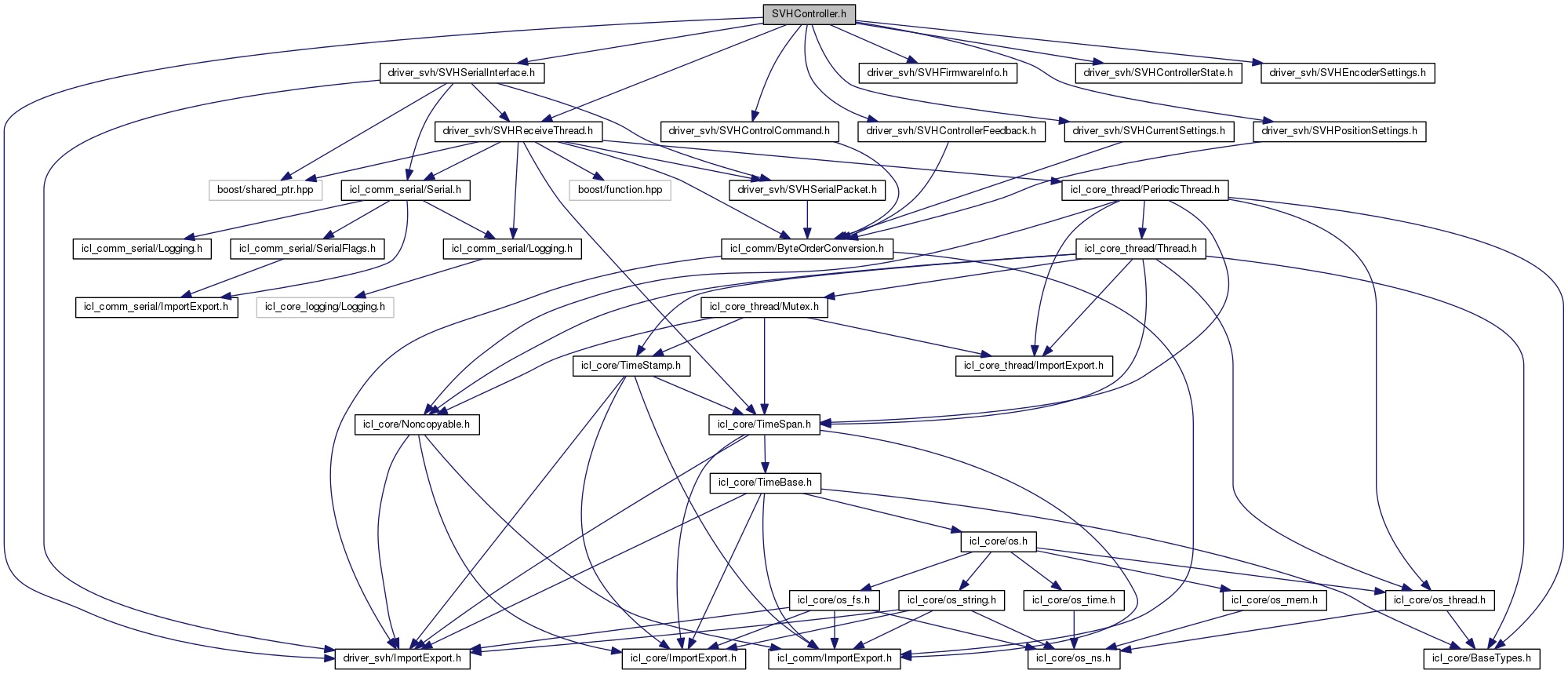
Go to the source code of this file.
Classes | |
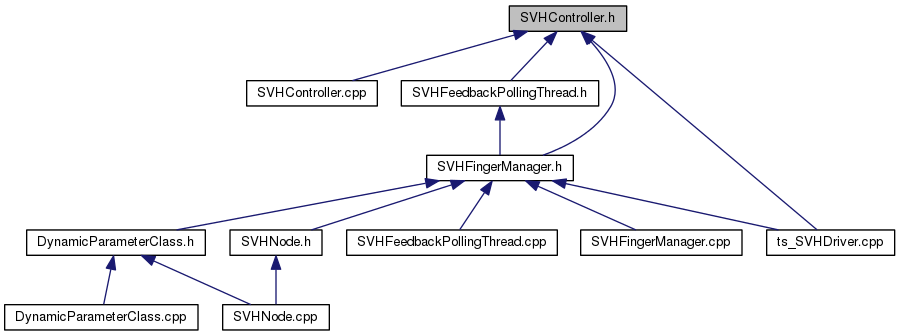
| class | driver_svh::SVHController |
| This class controls the the SCHUNK five finger hand. More... | |
Namespaces | |
| namespace | driver_svh |
Enumerations | |
| enum | driver_svh::SVHChannel { driver_svh::eSVH_ALL = -1, driver_svh::eSVH_THUMB_FLEXION = 0, driver_svh::eSVH_THUMB_OPPOSITION, driver_svh::eSVH_INDEX_FINGER_DISTAL, driver_svh::eSVH_INDEX_FINGER_PROXIMAL, driver_svh::eSVH_MIDDLE_FINGER_DISTAL, driver_svh::eSVH_MIDDLE_FINGER_PROXIMAL, driver_svh::eSVH_RING_FINGER, driver_svh::eSVH_PINKY, driver_svh::eSVH_FINGER_SPREAD, driver_svh::eSVH_DIMENSION } |
| Channel indicates which motor to use in command calls. WARNING: DO NOT CHANGE THE ORDER OF THESE as it represents the hardware mapping. More... | |
Detailed Description
- Date:
- 2014-01-30
This file contains the SVH controler, the heart of the driver. It is responsible to manage all logical decissions regarding the hardware on a low level. It knows what packet index is used for which function and holds all the data objects that can be queried externally. The controller should not be queried by outside calls directly as it asumes the calls to be non maleformed or contain out of bounds acces as this is handled by the finger manager.Only minimal safeguards are in place. Also note that the calls on this level should be made channel wise. The iteration of channels is done in the finger controller.
Request and Get principle: As the communication with the hand had some issues with the bandwith there are two types of function calls. The request functions tell the driver to actually request the data from the hardware. The get functions just get the last received value from the controller without actually querrying the hardware. This might be changed in further releases.
Definition in file SVHController.h.