#include <MarshallingService.hpp>
Public Types | |
| typedef boost::shared_ptr < MarshallingService > | shared_ptr |
Public Member Functions | |
| bool | loadProperties (const std::string &filename) const |
| bool | loadServiceProperties (const std::string &filename, const std::string &servicename) const |
| MarshallingService (TaskContext *parent) | |
| bool | readProperties (const std::string &filename) const |
| bool | readProperty (const std::string &name, const std::string &filename) |
| bool | readServiceProperties (const std::string &filename, const std::string &servicename) const |
| bool | readServiceProperty (const std::string &name, const std::string &filename, const std::string &servicename) |
| bool | storeProperties (const std::string &filename) const |
| bool | storeServiceProperties (const std::string &filename, const std::string &servicename) const |
| bool | updateFile (const std::string &filename) const |
| bool | updateProperties (const std::string &filename) const |
| bool | updateServiceFile (const std::string &filename, const std::string &servicename) const |
| bool | updateServiceProperties (const std::string &filename, const std::string &servicename) const |
| bool | writeProperties (const std::string &filename) const |
| bool | writeProperty (const std::string &name, const std::string &filename) |
| bool | writeServiceProperties (const std::string &filename, const std::string &servicename) const |
| bool | writeServiceProperty (const std::string &name, const std::string &filename, const std::string &servicename) |
Static Public Member Functions | |
| static shared_ptr | Create (TaskContext *parent) |
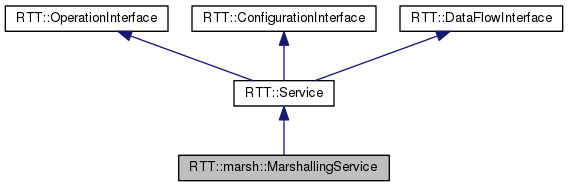
Detailed Description
Service which loads and saves properties of a TaskContext.
Definition at line 54 of file MarshallingService.hpp.
Member Typedef Documentation
| typedef boost::shared_ptr<MarshallingService> RTT::marsh::MarshallingService::shared_ptr |
Reimplemented from RTT::Service.
Definition at line 58 of file MarshallingService.hpp.
Constructor & Destructor Documentation
Creates a MarshallingService object. You need to add the service to parent yourself, or use Create(). This object is normally created by a TaskContext.
Definition at line 62 of file MarshallingService.cpp.
Member Function Documentation
| MarshallingService::shared_ptr RTT::MarshallingService::Create | ( | TaskContext * | parent | ) | [static] |
Creates a MarshallingService object and registers the service to parent.
Definition at line 56 of file MarshallingService.cpp.
| bool RTT::MarshallingService::loadProperties | ( | const std::string & | filename | ) | const |
Read a property file and update (or create any missing) properties in the TaskContext. This function allows to dynamically add properties to a component. This can be useful in combination with Orocos scripts when the script requires additional properties from the parent TaskContext.
Definition at line 132 of file MarshallingService.cpp.
| bool RTT::MarshallingService::loadServiceProperties | ( | const std::string & | filename, |
| const std::string & | servicename | ||
| ) | const |
Read a property file and update (or create any missing) properties of a Service. This function allows to dynamically add properties to a component. This can be useful in combination with Orocos scripts when the script requires additional properties from the Service.
Definition at line 176 of file MarshallingService.cpp.
| bool RTT::MarshallingService::readProperties | ( | const std::string & | filename | ) | const |
Read the property file and 'refresh' all the properties of the TaskContext. There may be more properties in the file than properties in the TaskContext, but all properties of the TaskContext must be present in filename. In case a type mismatch occurs, this method will fail and update no properties.
- Parameters:
-
filename The file to read from.
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 144 of file MarshallingService.cpp.
| bool RTT::MarshallingService::readProperty | ( | const std::string & | name, |
| const std::string & | filename | ||
| ) |
Read a single property from a file. The name may be a 'path' like location of a Property in the hierarchy.
- Parameters:
-
name The name of the property in the file. For example "MyProp" for a top-level property or "Settings.XML.Editor" to specify a dot-separated 'path' to the property 'Editor'. filename The name of the file in which to lookup name.
Definition at line 165 of file MarshallingService.cpp.
| bool RTT::MarshallingService::readServiceProperties | ( | const std::string & | filename, |
| const std::string & | servicename | ||
| ) | const |
Read the property file and 'refresh' all the properties of a Service. There may be more properties in the file than properties in the Service, but all properties of the Service must be present in filename. In case a type mismatch occurs, this method will fail and update no properties.
- Parameters:
-
filename The file to read from. servicename Service to use
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 198 of file MarshallingService.cpp.
| bool RTT::MarshallingService::readServiceProperty | ( | const std::string & | name, |
| const std::string & | filename, | ||
| const std::string & | servicename | ||
| ) |
Read a single property from a file. The name may be a 'path' like location of a Property in the hierarchy.
- Parameters:
-
name The name of the property in the file. For example "MyProp" for a top-level property or "Settings.XML.Editor" to specify a dot-separated 'path' to the property 'Editor'. filename The name of the file in which to lookup name. servicename Service to use
Definition at line 239 of file MarshallingService.cpp.
| bool RTT::MarshallingService::storeProperties | ( | const std::string & | filename | ) | const |
Stores all properties of a TaskContext in a new file or overwrite an existing one. The file given in filename will always be overwritten and any existing content will be lost.
- Parameters:
-
filename The file to store to.
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 138 of file MarshallingService.cpp.
| bool RTT::MarshallingService::storeServiceProperties | ( | const std::string & | filename, |
| const std::string & | servicename | ||
| ) | const |
Stores all properties of a Service in a new file or overwrite an existing one. The file given in filename will always be overwritten and any existing content will be lost.
- Parameters:
-
filename The file to store to. servicename Service to use
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 187 of file MarshallingService.cpp.
| bool RTT::MarshallingService::updateFile | ( | const std::string & | filename | ) | const |
Write the property file with the properties of a TaskContext, which are already present in filename. No new entries are created in the file, only existing ones are updated. The file is first read in, the resulting tree is updated with the task's properties, and then written to disk again.
- Parameters:
-
filename The file to read from and write to.
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 159 of file MarshallingService.cpp.
| bool RTT::MarshallingService::updateProperties | ( | const std::string & | filename | ) | const |
Read the property file and 'refresh' some properties of the TaskContext. There may be more properties in the file than properties in the TaskContext, and some may be missing in the file. This method will update 'as much as possible' properties. In case a type mismatch occurs, this method will fail and update no properties.
- Parameters:
-
filename The file to read all the properties from.
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 149 of file MarshallingService.cpp.
| bool RTT::MarshallingService::updateServiceFile | ( | const std::string & | filename, |
| const std::string & | servicename | ||
| ) | const |
Write the property file with the properties of a Service, which are already present in filename. No new entries are created in the file, only existing ones are updated. The file is first read in, the resulting tree is updated with the task's properties, and then written to disk again.
- Parameters:
-
filename The file to read from and write to. servicename Service to use
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 228 of file MarshallingService.cpp.
| bool RTT::MarshallingService::updateServiceProperties | ( | const std::string & | filename, |
| const std::string & | servicename | ||
| ) | const |
Read the property file and 'refresh' some properties of the Service. There may be more properties in the file than properties in the Service, and some may be missing in the file. This method will update 'as much as possible' properties. In case a type mismatch occurs, this method will fail and update no properties.
- Parameters:
-
filename The file to read all the properties from. servicename Service to use
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 208 of file MarshallingService.cpp.
| bool RTT::MarshallingService::writeProperties | ( | const std::string & | filename | ) | const |
Write the property file with the properties of a TaskContext. The file is first read in, the resulting tree is updated with the task's properties and then written to disk again. This allows to share files between tasks.
- Parameters:
-
filename The file to read from and write to (updating).
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 154 of file MarshallingService.cpp.
| bool RTT::MarshallingService::writeProperty | ( | const std::string & | name, |
| const std::string & | filename | ||
| ) |
Write a single property to a file. The name may be a 'path' like location of a Property in the hierarchy.
- Parameters:
-
name The name of the property in the file. For example "MyProp" for a top-level property or "Settings.XML.Editor" to specify a dot-separated 'path' to the property 'Editor'. filename The name of the file in which to write name.
Definition at line 170 of file MarshallingService.cpp.
| bool RTT::MarshallingService::writeServiceProperties | ( | const std::string & | filename, |
| const std::string & | servicename | ||
| ) | const |
Write the property file with the properties of a Service. The file is first read in, the resulting tree is updated with the task's properties and then written to disk again. This allows to share files between tasks.
- Parameters:
-
filename The file to read from and write to (updating). servicename Service to use
- Returns:
- true on success, false on error, consult Logger output for messages.
Definition at line 218 of file MarshallingService.cpp.
| bool RTT::MarshallingService::writeServiceProperty | ( | const std::string & | name, |
| const std::string & | filename, | ||
| const std::string & | servicename | ||
| ) |
Write a single property to a file. The name may be a 'path' like location of a Property in the hierarchy.
- Parameters:
-
name The name of the property in the file. For example "MyProp" for a top-level property or "Settings.XML.Editor" to specify a dot-separated 'path' to the property 'Editor'. filename The name of the file in which to write name. servicename Service to use
Definition at line 249 of file MarshallingService.cpp.
The documentation for this class was generated from the following files: