Managed<Derived,R> class implements a base class which manages ROS resources, such as ros::Subscriber and ros::ServiceServer. It uses CRTP idiom for static polymorphism and adds functionality to pause and resume, as well as acquire and release the resource. More...
Include dependency graph for managed_resource.h:

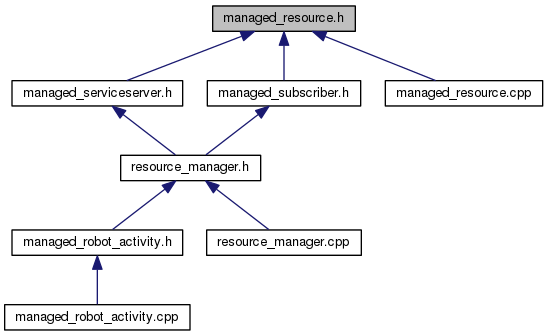
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robot_activity::resource::Managed< Derived, Resource > |
| Wrapper around ROS resources, such as ros::Subscriber and ros::ServiceServer. More... | |
Namespaces | |
| namespace | robot_activity |
| namespace | robot_activity::resource |
Detailed Description
Managed<Derived,R> class implements a base class which manages ROS resources, such as ros::Subscriber and ros::ServiceServer. It uses CRTP idiom for static polymorphism and adds functionality to pause and resume, as well as acquire and release the resource.
- Date:
- 01/03/2018
Definition in file managed_resource.h.