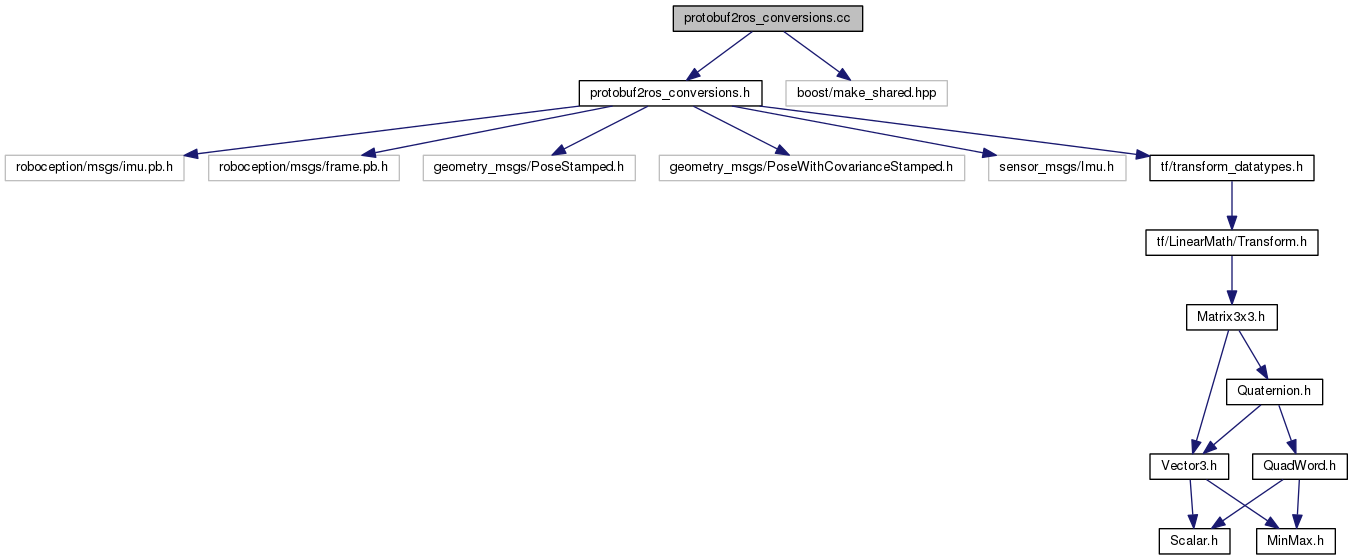
Include dependency graph for protobuf2ros_conversions.cc:
Go to the source code of this file.
Namespaces | |
| namespace | rc |
Functions | |
| sensor_msgs::ImuPtr | rc::toRosImu (std::shared_ptr< roboception::msgs::Imu > imu) |
| geometry_msgs::PoseStampedPtr | rc::toRosPoseStamped (std::shared_ptr< roboception::msgs::Frame > frame) |
| geometry_msgs::PoseWithCovarianceStampedPtr | rc::toRosPoseWithCovarianceStamped (std::shared_ptr< roboception::msgs::Frame > frame) |
| tf::StampedTransform | rc::toRosTfStampedTransform (std::shared_ptr< roboception::msgs::Frame > frame) |
| tf::Transform | rc::toRosTfTransform (std::shared_ptr< roboception::msgs::Frame > frame) |