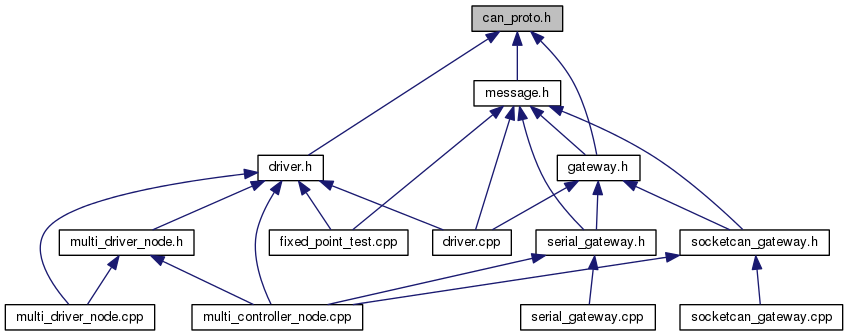
Go to the source code of this file.
Define Documentation
| #define CAN_API_MC_ACK 0x00002000 |
Definition at line 126 of file can_proto.h.
| #define CAN_API_MC_CFG 0x00001c00 |
Definition at line 125 of file can_proto.h.
| #define CAN_API_MC_ICTRL 0x00001000 |
Definition at line 122 of file can_proto.h.
| #define CAN_API_MC_POS 0x00000c00 |
Definition at line 121 of file can_proto.h.
| #define CAN_API_MC_PSTAT 0x00001800 |
Definition at line 124 of file can_proto.h.
| #define CAN_API_MC_SPD 0x00000400 |
Definition at line 119 of file can_proto.h.
| #define CAN_API_MC_STATUS 0x00001400 |
Definition at line 123 of file can_proto.h.
| #define CAN_API_MC_VCOMP 0x00000800 |
Definition at line 120 of file can_proto.h.
| #define CAN_API_MC_VOLTAGE 0x00000000 |
Definition at line 118 of file can_proto.h.
| #define CAN_MSGID_API_CLASS_M 0x0000fc00 |
Definition at line 108 of file can_proto.h.
| #define CAN_MSGID_API_DEVASSIGN 0x00000080 |
Definition at line 58 of file can_proto.h.
| #define CAN_MSGID_API_DEVQUERY 0x000000c0 |
Definition at line 59 of file can_proto.h.
| #define CAN_MSGID_API_ENUMERATE 0x00000240 |
Definition at line 64 of file can_proto.h.
| #define CAN_MSGID_API_FIRMVER 0x00000200 |
Definition at line 63 of file can_proto.h.
| #define CAN_MSGID_API_HEARTBEAT 0x00000140 |
Definition at line 60 of file can_proto.h.
| #define CAN_MSGID_API_ID_M 0x000003c0 |
Definition at line 109 of file can_proto.h.
| #define CAN_MSGID_API_M 0x0000ffc0 |
Definition at line 36 of file can_proto.h.
| #define CAN_MSGID_API_S 6 |
Definition at line 40 of file can_proto.h.
| #define CAN_MSGID_API_SYNC 0x00000180 |
Definition at line 61 of file can_proto.h.
| #define CAN_MSGID_API_SYSHALT 0x00000000 |
Definition at line 56 of file can_proto.h.
| #define CAN_MSGID_API_SYSRESUME 0x00000280 |
Definition at line 65 of file can_proto.h.
| #define CAN_MSGID_API_SYSRST 0x00000040 |
Definition at line 57 of file can_proto.h.
| #define CAN_MSGID_API_UPDATE 0x000001c0 |
Definition at line 62 of file can_proto.h.
| #define CAN_MSGID_DEVNO_BCAST 0x00000000 |
Definition at line 49 of file can_proto.h.
| #define CAN_MSGID_DEVNO_M 0x0000003f |
Definition at line 35 of file can_proto.h.
| #define CAN_MSGID_DEVNO_S 0 |
Definition at line 39 of file can_proto.h.
| #define CAN_MSGID_DTYPE_ACCEL 0x05000000 |
Definition at line 98 of file can_proto.h.
| #define CAN_MSGID_DTYPE_BCAST 0x00000000 |
Definition at line 93 of file can_proto.h.
| #define CAN_MSGID_DTYPE_GEART 0x07000000 |
Definition at line 100 of file can_proto.h.
| #define CAN_MSGID_DTYPE_GYRO 0x04000000 |
Definition at line 97 of file can_proto.h.
| #define CAN_MSGID_DTYPE_M 0x1f000000 |
Definition at line 38 of file can_proto.h.
| #define CAN_MSGID_DTYPE_MOTOR 0x02000000 |
Definition at line 95 of file can_proto.h.
| #define CAN_MSGID_DTYPE_RELAY 0x03000000 |
Definition at line 96 of file can_proto.h.
| #define CAN_MSGID_DTYPE_ROBOT 0x01000000 |
Definition at line 94 of file can_proto.h.
| #define CAN_MSGID_DTYPE_S 24 |
Definition at line 42 of file can_proto.h.
| #define CAN_MSGID_DTYPE_UPDATE 0x1f000000 |
Definition at line 101 of file can_proto.h.
| #define CAN_MSGID_DTYPE_USONIC 0x06000000 |
Definition at line 99 of file can_proto.h.
| #define CAN_MSGID_FULL_M 0x1fffffff |
Definition at line 34 of file can_proto.h.
| #define CAN_MSGID_MFR_DEKA 0x00030000 |
Definition at line 86 of file can_proto.h.
| #define CAN_MSGID_MFR_LM 0x00020000 |
Definition at line 85 of file can_proto.h.
| #define CAN_MSGID_MFR_M 0x00ff0000 |
Definition at line 37 of file can_proto.h.
| #define CAN_MSGID_MFR_NI 0x00010000 |
Definition at line 84 of file can_proto.h.
| #define CAN_MSGID_MFR_S 16 |
Definition at line 41 of file can_proto.h.
| #define CAN_STATUS_CODE_M 0x0000ffff |
Definition at line 72 of file can_proto.h.
| #define CAN_STATUS_CODE_S 0 |
Definition at line 75 of file can_proto.h.
| #define CAN_STATUS_DTYPE_M 0x1f000000 |
Definition at line 74 of file can_proto.h.
| #define CAN_STATUS_DTYPE_S 24 |
Definition at line 77 of file can_proto.h.
| #define CAN_STATUS_MFG_M 0x00ff0000 |
Definition at line 73 of file can_proto.h.
| #define CAN_STATUS_MFG_S 16 |
Definition at line 76 of file can_proto.h.
| #define CPR_API_CFG_MINIMUM_LEVEL (LM_API_CFG | (12 << CAN_MSGID_API_S)) |
Definition at line 290 of file can_proto.h.
| #define CPR_API_CFG_NOMINAL_LEVEL (LM_API_CFG | (13 << CAN_MSGID_API_S)) |
Definition at line 291 of file can_proto.h.
| #define CPR_API_CFG_SHUTDOWN_TEMP (LM_API_CFG | (11 << CAN_MSGID_API_S)) |
Definition at line 289 of file can_proto.h.
| #define CPR_API_CFG_SHUTOFF_LEVEL (LM_API_CFG | (14 << CAN_MSGID_API_S)) |
Definition at line 292 of file can_proto.h.
| #define CPR_API_CFG_SHUTOFF_TIME (LM_API_CFG | (15 << CAN_MSGID_API_S)) |
Definition at line 293 of file can_proto.h.
| #define CPR_API_STATUS_ANALOG (LM_API_STATUS | (15 << CAN_MSGID_API_S)) |
Definition at line 249 of file can_proto.h.
| #define LM_API_ACK |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_ACK)
Definition at line 301 of file can_proto.h.
| #define LM_API_CFG |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_CFG)
Definition at line 277 of file can_proto.h.
| #define LM_API_CFG_BRAKE_COAST (LM_API_CFG | (3 << CAN_MSGID_API_S)) |
Definition at line 282 of file can_proto.h.
| #define LM_API_CFG_ENC_LINES (LM_API_CFG | (1 << CAN_MSGID_API_S)) |
Definition at line 280 of file can_proto.h.
| #define LM_API_CFG_FAULT_TIME (LM_API_CFG | (8 << CAN_MSGID_API_S)) |
Definition at line 287 of file can_proto.h.
| #define LM_API_CFG_LIMIT_FWD (LM_API_CFG | (5 << CAN_MSGID_API_S)) |
Definition at line 284 of file can_proto.h.
| #define LM_API_CFG_LIMIT_MODE (LM_API_CFG | (4 << CAN_MSGID_API_S)) |
Definition at line 283 of file can_proto.h.
| #define LM_API_CFG_LIMIT_REV (LM_API_CFG | (6 << CAN_MSGID_API_S)) |
Definition at line 285 of file can_proto.h.
| #define LM_API_CFG_MAX_VOUT (LM_API_CFG | (7 << CAN_MSGID_API_S)) |
Definition at line 286 of file can_proto.h.
| #define LM_API_CFG_NUM_BRUSHES (LM_API_CFG | (0 << CAN_MSGID_API_S)) |
Definition at line 279 of file can_proto.h.
| #define LM_API_CFG_POT_TURNS (LM_API_CFG | (2 << CAN_MSGID_API_S)) |
Definition at line 281 of file can_proto.h.
| #define LM_API_HWVER (LM_API_UPD | (5 << CAN_MSGID_API_S)) |
Definition at line 227 of file can_proto.h.
| #define LM_API_ICTRL |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_ICTRL)
Definition at line 206 of file can_proto.h.
| #define LM_API_ICTRL_DC (LM_API_ICTRL | (5 << CAN_MSGID_API_S)) |
Definition at line 213 of file can_proto.h.
| #define LM_API_ICTRL_DIS (LM_API_ICTRL | (1 << CAN_MSGID_API_S)) |
Definition at line 209 of file can_proto.h.
| #define LM_API_ICTRL_EN (LM_API_ICTRL | (0 << CAN_MSGID_API_S)) |
Definition at line 208 of file can_proto.h.
| #define LM_API_ICTRL_IC (LM_API_ICTRL | (4 << CAN_MSGID_API_S)) |
Definition at line 212 of file can_proto.h.
| #define LM_API_ICTRL_PC (LM_API_ICTRL | (3 << CAN_MSGID_API_S)) |
Definition at line 211 of file can_proto.h.
| #define LM_API_ICTRL_SET (LM_API_ICTRL | (2 << CAN_MSGID_API_S)) |
Definition at line 210 of file can_proto.h.
| #define LM_API_ICTRL_SET_NO_ACK (LM_API_ICTRL | (10 << CAN_MSGID_API_S)) |
Definition at line 214 of file can_proto.h.
| #define LM_API_POS |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_POS)
Definition at line 190 of file can_proto.h.
| #define LM_API_POS_DC (LM_API_POS | (5 << CAN_MSGID_API_S)) |
Definition at line 197 of file can_proto.h.
| #define LM_API_POS_DIS (LM_API_POS | (1 << CAN_MSGID_API_S)) |
Definition at line 193 of file can_proto.h.
| #define LM_API_POS_EN (LM_API_POS | (0 << CAN_MSGID_API_S)) |
Definition at line 192 of file can_proto.h.
| #define LM_API_POS_IC (LM_API_POS | (4 << CAN_MSGID_API_S)) |
Definition at line 196 of file can_proto.h.
| #define LM_API_POS_PC (LM_API_POS | (3 << CAN_MSGID_API_S)) |
Definition at line 195 of file can_proto.h.
| #define LM_API_POS_REF (LM_API_POS | (6 << CAN_MSGID_API_S)) |
Definition at line 198 of file can_proto.h.
| #define LM_API_POS_SET (LM_API_POS | (2 << CAN_MSGID_API_S)) |
Definition at line 194 of file can_proto.h.
| #define LM_API_POS_SET_NO_ACK (LM_API_POS | (11 << CAN_MSGID_API_S)) |
Definition at line 199 of file can_proto.h.
| #define LM_API_PSTAT |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_PSTAT)
Definition at line 353 of file can_proto.h.
| #define LM_API_PSTAT_CFG_S0 (LM_API_PSTAT | (4 << CAN_MSGID_API_S)) |
Definition at line 359 of file can_proto.h.
| #define LM_API_PSTAT_CFG_S1 (LM_API_PSTAT | (5 << CAN_MSGID_API_S)) |
Definition at line 360 of file can_proto.h.
| #define LM_API_PSTAT_CFG_S2 (LM_API_PSTAT | (6 << CAN_MSGID_API_S)) |
Definition at line 361 of file can_proto.h.
| #define LM_API_PSTAT_CFG_S3 (LM_API_PSTAT | (7 << CAN_MSGID_API_S)) |
Definition at line 362 of file can_proto.h.
| #define LM_API_PSTAT_DATA_S0 (LM_API_PSTAT | (8 << CAN_MSGID_API_S)) |
Definition at line 363 of file can_proto.h.
| #define LM_API_PSTAT_DATA_S1 (LM_API_PSTAT | (9 << CAN_MSGID_API_S)) |
Definition at line 364 of file can_proto.h.
| #define LM_API_PSTAT_DATA_S2 (LM_API_PSTAT | (10 << CAN_MSGID_API_S)) |
Definition at line 365 of file can_proto.h.
| #define LM_API_PSTAT_DATA_S3 (LM_API_PSTAT | (11 << CAN_MSGID_API_S)) |
Definition at line 366 of file can_proto.h.
| #define LM_API_PSTAT_PER_EN_S0 (LM_API_PSTAT | (0 << CAN_MSGID_API_S)) |
Definition at line 355 of file can_proto.h.
| #define LM_API_PSTAT_PER_EN_S1 (LM_API_PSTAT | (1 << CAN_MSGID_API_S)) |
Definition at line 356 of file can_proto.h.
| #define LM_API_PSTAT_PER_EN_S2 (LM_API_PSTAT | (2 << CAN_MSGID_API_S)) |
Definition at line 357 of file can_proto.h.
| #define LM_API_PSTAT_PER_EN_S3 (LM_API_PSTAT | (3 << CAN_MSGID_API_S)) |
Definition at line 358 of file can_proto.h.
| #define LM_API_SPD |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_SPD)
Definition at line 160 of file can_proto.h.
| #define LM_API_SPD_DC (LM_API_SPD | (5 << CAN_MSGID_API_S)) |
Definition at line 167 of file can_proto.h.
| #define LM_API_SPD_DIS (LM_API_SPD | (1 << CAN_MSGID_API_S)) |
Definition at line 163 of file can_proto.h.
| #define LM_API_SPD_EN (LM_API_SPD | (0 << CAN_MSGID_API_S)) |
Definition at line 162 of file can_proto.h.
| #define LM_API_SPD_IC (LM_API_SPD | (4 << CAN_MSGID_API_S)) |
Definition at line 166 of file can_proto.h.
| #define LM_API_SPD_PC (LM_API_SPD | (3 << CAN_MSGID_API_S)) |
Definition at line 165 of file can_proto.h.
| #define LM_API_SPD_REF (LM_API_SPD | (6 << CAN_MSGID_API_S)) |
Definition at line 168 of file can_proto.h.
| #define LM_API_SPD_SET (LM_API_SPD | (2 << CAN_MSGID_API_S)) |
Definition at line 164 of file can_proto.h.
| #define LM_API_SPD_SET_NO_ACK (LM_API_SPD | (11 << CAN_MSGID_API_S)) |
Definition at line 169 of file can_proto.h.
| #define LM_API_STATUS |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_STATUS)
Definition at line 235 of file can_proto.h.
| #define LM_API_STATUS_CMODE (LM_API_STATUS | (9 << CAN_MSGID_API_S)) |
Definition at line 246 of file can_proto.h.
| #define LM_API_STATUS_CURRENT (LM_API_STATUS | (2 << CAN_MSGID_API_S)) |
Definition at line 239 of file can_proto.h.
| #define LM_API_STATUS_FAULT (LM_API_STATUS | (7 << CAN_MSGID_API_S)) |
Definition at line 244 of file can_proto.h.
| #define LM_API_STATUS_FLT_COUNT (LM_API_STATUS | (12 << CAN_MSGID_API_S)) |
Definition at line 251 of file can_proto.h.
| #define LM_API_STATUS_LIMIT (LM_API_STATUS | (6 << CAN_MSGID_API_S)) |
Definition at line 243 of file can_proto.h.
| #define LM_API_STATUS_POS (LM_API_STATUS | (4 << CAN_MSGID_API_S)) |
Definition at line 241 of file can_proto.h.
| #define LM_API_STATUS_POWER (LM_API_STATUS | (8 << CAN_MSGID_API_S)) |
Definition at line 245 of file can_proto.h.
| #define LM_API_STATUS_SPD (LM_API_STATUS | (5 << CAN_MSGID_API_S)) |
Definition at line 242 of file can_proto.h.
| #define LM_API_STATUS_STKY_FLT (LM_API_STATUS | (11 << CAN_MSGID_API_S)) |
Definition at line 250 of file can_proto.h.
| #define LM_API_STATUS_TEMP (LM_API_STATUS | (3 << CAN_MSGID_API_S)) |
Definition at line 240 of file can_proto.h.
| #define LM_API_STATUS_VOLTBUS (LM_API_STATUS | (1 << CAN_MSGID_API_S)) |
Definition at line 238 of file can_proto.h.
| #define LM_API_STATUS_VOLTOUT (LM_API_STATUS | (0 << CAN_MSGID_API_S)) |
Definition at line 237 of file can_proto.h.
| #define LM_API_STATUS_VOUT (LM_API_STATUS | (10 << CAN_MSGID_API_S)) |
Definition at line 247 of file can_proto.h.
| #define LM_API_SYNC_PEND_NOW 0 |
Definition at line 153 of file can_proto.h.
| #define LM_API_UPD (CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_UPDATE) |
Definition at line 221 of file can_proto.h.
| #define LM_API_UPD_ACK (LM_API_UPD | (4 << CAN_MSGID_API_S)) |
Definition at line 226 of file can_proto.h.
| #define LM_API_UPD_DOWNLOAD (LM_API_UPD | (1 << CAN_MSGID_API_S)) |
Definition at line 223 of file can_proto.h.
| #define LM_API_UPD_PING (LM_API_UPD | (0 << CAN_MSGID_API_S)) |
Definition at line 222 of file can_proto.h.
| #define LM_API_UPD_REQUEST (LM_API_UPD | (6 << CAN_MSGID_API_S)) |
Definition at line 228 of file can_proto.h.
| #define LM_API_UPD_RESET (LM_API_UPD | (3 << CAN_MSGID_API_S)) |
Definition at line 225 of file can_proto.h.
| #define LM_API_UPD_SEND_DATA (LM_API_UPD | (2 << CAN_MSGID_API_S)) |
Definition at line 224 of file can_proto.h.
| #define LM_API_VCOMP |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_VCOMP)
Definition at line 176 of file can_proto.h.
| #define LM_API_VCOMP_COMP_RAMP (LM_API_VCOMP | (4 << CAN_MSGID_API_S)) |
Definition at line 182 of file can_proto.h.
| #define LM_API_VCOMP_DIS (LM_API_VCOMP | (1 << CAN_MSGID_API_S)) |
Definition at line 179 of file can_proto.h.
| #define LM_API_VCOMP_EN (LM_API_VCOMP | (0 << CAN_MSGID_API_S)) |
Definition at line 178 of file can_proto.h.
| #define LM_API_VCOMP_IN_RAMP (LM_API_VCOMP | (3 << CAN_MSGID_API_S)) |
Definition at line 181 of file can_proto.h.
| #define LM_API_VCOMP_SET (LM_API_VCOMP | (2 << CAN_MSGID_API_S)) |
Definition at line 180 of file can_proto.h.
| #define LM_API_VCOMP_SET_NO_ACK (LM_API_VCOMP | (9 << CAN_MSGID_API_S)) |
Definition at line 183 of file can_proto.h.
| #define LM_API_VOLT |
(CAN_MSGID_MFR_LM | CAN_MSGID_DTYPE_MOTOR | \ CAN_API_MC_VOLTAGE)
Definition at line 133 of file can_proto.h.
| #define LM_API_VOLT_DIS (LM_API_VOLT | (1 << CAN_MSGID_API_S)) |
Definition at line 136 of file can_proto.h.
| #define LM_API_VOLT_EN (LM_API_VOLT | (0 << CAN_MSGID_API_S)) |
Definition at line 135 of file can_proto.h.
| #define LM_API_VOLT_RAMP_DIS 0 |
Definition at line 146 of file can_proto.h.
| #define LM_API_VOLT_SET (LM_API_VOLT | (2 << CAN_MSGID_API_S)) |
Definition at line 137 of file can_proto.h.
| #define LM_API_VOLT_SET_NO_ACK (LM_API_VOLT | (8 << CAN_MSGID_API_S)) |
Definition at line 139 of file can_proto.h.
| #define LM_API_VOLT_SET_RAMP (LM_API_VOLT | (3 << CAN_MSGID_API_S)) |
Definition at line 138 of file can_proto.h.
| #define LM_FAULT_COMM 0x10 |
Definition at line 346 of file can_proto.h.
| #define LM_FAULT_CURRENT 0x01 |
Definition at line 342 of file can_proto.h.
| #define LM_FAULT_GATE_DRIVE 0x08 |
Definition at line 345 of file can_proto.h.
| #define LM_FAULT_TEMP 0x02 |
Definition at line 343 of file can_proto.h.
| #define LM_FAULT_VBUS 0x04 |
Definition at line 344 of file can_proto.h.
| #define LM_HWVER_JAG_1_0 0x01 |
Definition at line 310 of file can_proto.h.
| #define LM_HWVER_JAG_2_0 0x02 |
Definition at line 311 of file can_proto.h.
| #define LM_HWVER_UNKNOWN 0x00 |
Definition at line 309 of file can_proto.h.
| #define LM_PSTAT_CANERR_B0 30 |
Definition at line 407 of file can_proto.h.
| #define LM_PSTAT_CANERR_B1 31 |
Definition at line 408 of file can_proto.h.
| #define LM_PSTAT_CANSTS 29 |
Definition at line 406 of file can_proto.h.
| #define LM_PSTAT_CURRENT_B0 5 |
Definition at line 380 of file can_proto.h.
| #define LM_PSTAT_CURRENT_B1 6 |
Definition at line 381 of file can_proto.h.
| #define LM_PSTAT_END 0 |
Definition at line 375 of file can_proto.h.
| #define LM_PSTAT_FAULT 19 |
Definition at line 394 of file can_proto.h.
| #define LM_PSTAT_FLT_COUNT_COMM 28 |
Definition at line 405 of file can_proto.h.
| #define LM_PSTAT_FLT_COUNT_CURRENT 24 |
Definition at line 399 of file can_proto.h.
| #define LM_PSTAT_FLT_COUNT_GATE 27 |
Definition at line 404 of file can_proto.h.
| #define LM_PSTAT_FLT_COUNT_TEMP 25 |
Definition at line 401 of file can_proto.h.
| #define LM_PSTAT_FLT_COUNT_VOLTBUS 26 |
Definition at line 402 of file can_proto.h.
| #define LM_PSTAT_LIMIT_CLR 18 |
Definition at line 393 of file can_proto.h.
| #define LM_PSTAT_LIMIT_NCLR 17 |
Definition at line 392 of file can_proto.h.
| #define LM_PSTAT_POS_B0 9 |
Definition at line 384 of file can_proto.h.
| #define LM_PSTAT_POS_B1 10 |
Definition at line 385 of file can_proto.h.
| #define LM_PSTAT_POS_B2 11 |
Definition at line 386 of file can_proto.h.
| #define LM_PSTAT_POS_B3 12 |
Definition at line 387 of file can_proto.h.
| #define LM_PSTAT_SPD_B0 13 |
Definition at line 388 of file can_proto.h.
| #define LM_PSTAT_SPD_B1 14 |
Definition at line 389 of file can_proto.h.
| #define LM_PSTAT_SPD_B2 15 |
Definition at line 390 of file can_proto.h.
| #define LM_PSTAT_SPD_B3 16 |
Definition at line 391 of file can_proto.h.
| #define LM_PSTAT_STKY_FLT_CLR 21 |
Definition at line 396 of file can_proto.h.
| #define LM_PSTAT_STKY_FLT_NCLR 20 |
Definition at line 395 of file can_proto.h.
| #define LM_PSTAT_TEMP_B0 7 |
Definition at line 382 of file can_proto.h.
| #define LM_PSTAT_TEMP_B1 8 |
Definition at line 383 of file can_proto.h.
| #define LM_PSTAT_VOLTBUS_B0 3 |
Definition at line 378 of file can_proto.h.
| #define LM_PSTAT_VOLTBUS_B1 4 |
Definition at line 379 of file can_proto.h.
| #define LM_PSTAT_VOLTOUT_B0 1 |
Definition at line 376 of file can_proto.h.
| #define LM_PSTAT_VOLTOUT_B1 2 |
Definition at line 377 of file can_proto.h.
| #define LM_PSTAT_VOUT_B0 22 |
Definition at line 397 of file can_proto.h.
| #define LM_PSTAT_VOUT_B1 23 |
Definition at line 398 of file can_proto.h.
| #define LM_REF_ENCODER 0x00 |
Definition at line 331 of file can_proto.h.
| #define LM_REF_INV_ENCODER 0x02 |
Definition at line 333 of file can_proto.h.
| #define LM_REF_NONE 0xff |
Definition at line 335 of file can_proto.h.
| #define LM_REF_POT 0x01 |
Definition at line 332 of file can_proto.h.
| #define LM_REF_QUAD_ENCODER 0x03 |
Definition at line 334 of file can_proto.h.
| #define LM_STATUS_CMODE_CURRENT 0x01 |
Definition at line 319 of file can_proto.h.
| #define LM_STATUS_CMODE_POS 0x03 |
Definition at line 321 of file can_proto.h.
| #define LM_STATUS_CMODE_SPEED 0x02 |
Definition at line 320 of file can_proto.h.
| #define LM_STATUS_CMODE_VCOMP 0x04 |
Definition at line 322 of file can_proto.h.
| #define LM_STATUS_CMODE_VOLT 0x00 |
Definition at line 318 of file can_proto.h.
| #define LM_STATUS_FAULT_ILIMIT 0x01 |
Definition at line 268 of file can_proto.h.
| #define LM_STATUS_FAULT_TLIMIT 0x02 |
Definition at line 269 of file can_proto.h.
| #define LM_STATUS_FAULT_VLIMIT 0x04 |
Definition at line 270 of file can_proto.h.
| #define LM_STATUS_LIMIT_FWD 0x01 |
Definition at line 260 of file can_proto.h.
| #define LM_STATUS_LIMIT_REV 0x02 |
Definition at line 261 of file can_proto.h.