#include <pal_hardware_gazebo.h>
Public Member Functions | |
| bool | initSim (const std::string &robot_ns, ros::NodeHandle nh, gazebo::physics::ModelPtr model, const urdf::Model *const urdf_model, std::vector< transmission_interface::TransmissionInfo > transmissions) |
| PalHardwareGazebo () | |
| void | readSim (ros::Time time, ros::Duration period) |
| void | writeSim (ros::Time time, ros::Duration period) |
Private Member Functions | |
| bool | parseForceTorqueSensors (ros::NodeHandle &nh, gazebo::physics::ModelPtr model, const urdf::Model *const urdf_model) |
| bool | parseIMUSensors (ros::NodeHandle &nh, gazebo::physics::ModelPtr model, const urdf::Model *const urdf_model) |
Private Attributes | |
| std::vector < ForceTorqueSensorDefinitionPtr > | forceTorqueSensorDefinitions_ |
| hardware_interface::ForceTorqueSensorInterface | ft_sensor_interface_ |
| hardware_interface::ImuSensorInterface | imu_sensor_interface_ |
| std::vector < ImuSensorDefinitionPtr > | imuSensorDefinitions_ |
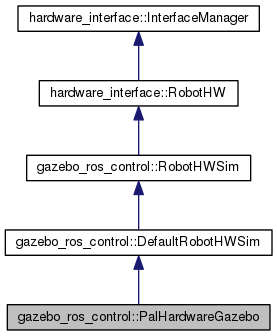
Detailed Description
Definition at line 80 of file pal_hardware_gazebo.h.
Constructor & Destructor Documentation
Definition at line 269 of file pal_hardware_gazebo.cpp.
Member Function Documentation
| bool gazebo_ros_control::PalHardwareGazebo::initSim | ( | const std::string & | robot_ns, |
| ros::NodeHandle | nh, | ||
| gazebo::physics::ModelPtr | model, | ||
| const urdf::Model *const | urdf_model, | ||
| std::vector< transmission_interface::TransmissionInfo > | transmissions | ||
| ) | [virtual] |
Reimplemented from gazebo_ros_control::DefaultRobotHWSim.
Definition at line 273 of file pal_hardware_gazebo.cpp.
| bool gazebo_ros_control::PalHardwareGazebo::parseForceTorqueSensors | ( | ros::NodeHandle & | nh, |
| gazebo::physics::ModelPtr | model, | ||
| const urdf::Model *const | urdf_model | ||
| ) | [private] |
Definition at line 151 of file pal_hardware_gazebo.cpp.
| bool gazebo_ros_control::PalHardwareGazebo::parseIMUSensors | ( | ros::NodeHandle & | nh, |
| gazebo::physics::ModelPtr | model, | ||
| const urdf::Model *const | urdf_model | ||
| ) | [private] |
Definition at line 237 of file pal_hardware_gazebo.cpp.
| void gazebo_ros_control::PalHardwareGazebo::readSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Reimplemented from gazebo_ros_control::DefaultRobotHWSim.
Definition at line 400 of file pal_hardware_gazebo.cpp.
| void gazebo_ros_control::PalHardwareGazebo::writeSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Reimplemented from gazebo_ros_control::DefaultRobotHWSim.
Definition at line 466 of file pal_hardware_gazebo.cpp.
Member Data Documentation
std::vector<ForceTorqueSensorDefinitionPtr> gazebo_ros_control::PalHardwareGazebo::forceTorqueSensorDefinitions_ [private] |
Definition at line 114 of file pal_hardware_gazebo.h.
hardware_interface::ForceTorqueSensorInterface gazebo_ros_control::PalHardwareGazebo::ft_sensor_interface_ [private] |
Definition at line 111 of file pal_hardware_gazebo.h.
hardware_interface::ImuSensorInterface gazebo_ros_control::PalHardwareGazebo::imu_sensor_interface_ [private] |
Definition at line 112 of file pal_hardware_gazebo.h.
std::vector<ImuSensorDefinitionPtr> gazebo_ros_control::PalHardwareGazebo::imuSensorDefinitions_ [private] |
Definition at line 115 of file pal_hardware_gazebo.h.
The documentation for this class was generated from the following files: