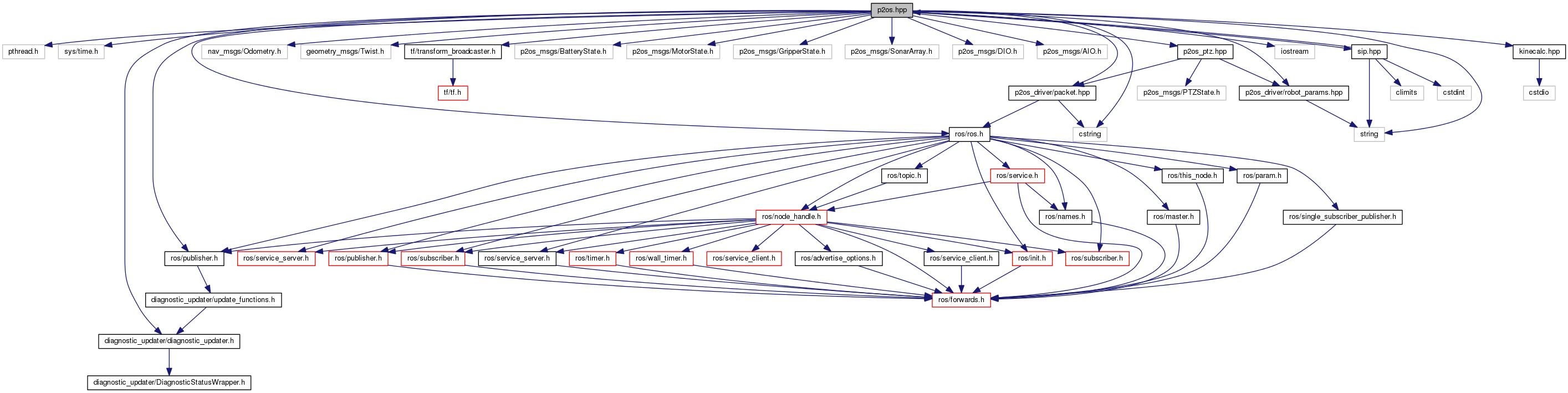
#include <pthread.h>#include <sys/time.h>#include <ros/ros.h>#include <nav_msgs/Odometry.h>#include <geometry_msgs/Twist.h>#include <tf/transform_broadcaster.h>#include <p2os_msgs/BatteryState.h>#include <p2os_msgs/MotorState.h>#include <p2os_msgs/GripperState.h>#include <p2os_msgs/SonarArray.h>#include <p2os_msgs/DIO.h>#include <p2os_msgs/AIO.h>#include <diagnostic_updater/publisher.h>#include <diagnostic_updater/diagnostic_updater.h>#include <p2os_driver/packet.hpp>#include <p2os_driver/robot_params.hpp>#include <iostream>#include <cstring>#include <string>#include "sip.hpp"#include "kinecalc.hpp"#include "p2os_ptz.hpp"
Include dependency graph for p2os.hpp:
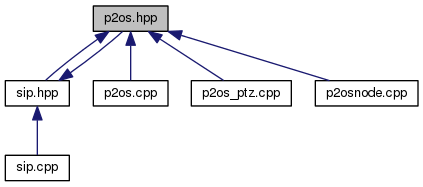
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | P2OSNode |
| struct | ros_p2os_data |
| Container struct. More... | |
Typedefs | |
| typedef struct ros_p2os_data | ros_p2os_data_t |
| Container struct. | |
Typedef Documentation
| typedef struct ros_p2os_data ros_p2os_data_t |
Container struct.
Create a struct that holds the Robot's sensors.