#include <hrpCorba/OpenHRPCommon.hh>#include <stack>#include "ModelLoaderUtil.h"#include "Sensor.h"#include "World.h"#include "psim.h"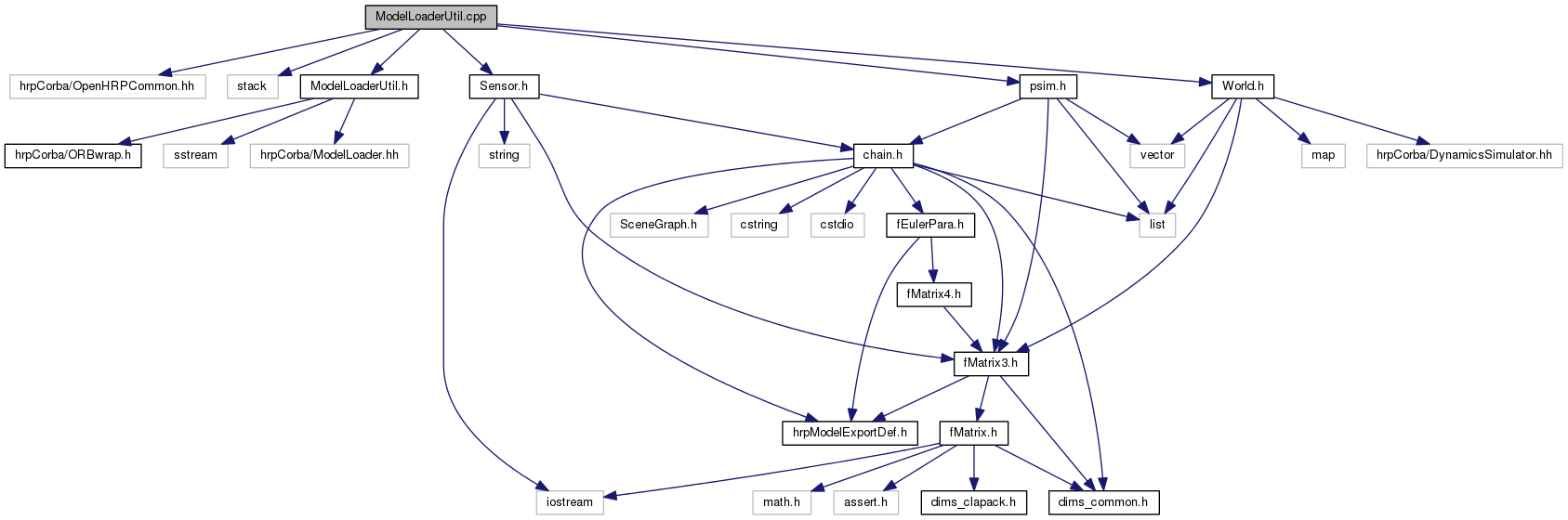
Go to the source code of this file.
Functions | |
| static void | array_to_mat33 (const DblArray4 &a, fMat33 &mat) |
| static void | array_to_mat33 (const DblArray9 &a, fMat33 &mat) |
| static void | array_to_vec3 (const DblArray3 &a, fVec3 &vec) |
| static Joint * | createLink (::World *world, const char *charname, int index, LinkInfoSequence_var iLinks, Joint *pjoint) |
| static void | createSensors (::World *world, Joint *jnt, SensorInfoSequence iSensors) |
| static double | getLimitValue (DblSequence_var limitseq, double defaultValue) |
| int | loadBodyFromBodyInfo (::World *world, const char *_name, BodyInfo_ptr bodyInfo) |
| int | loadBodyFromModelLoader (::World *world, const char *name, const char *url, CosNaming::NamingContext_var cxt) |
| int | loadBodyFromModelLoader (::World *world, const char *name, const char *url, CORBA_ORB_var orb) |
| int | loadBodyFromModelLoader (::World *world, const char *name, const char *url, int argc, char *argv[]) |
| int | loadBodyFromModelLoader (::World *world, const char *name, const char *URL, istringstream &strm) |
Function Documentation
| static void array_to_mat33 | ( | const DblArray4 & | a, |
| fMat33 & | mat | ||
| ) | [static] |
Definition at line 31 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| static void array_to_mat33 | ( | const DblArray9 & | a, |
| fMat33 & | mat | ||
| ) | [static] |
Definition at line 62 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| static void array_to_vec3 | ( | const DblArray3 & | a, |
| fVec3 & | vec | ||
| ) | [static] |
Definition at line 75 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| static Joint* createLink | ( | ::World * | world, |
| const char * | charname, | ||
| int | index, | ||
| LinkInfoSequence_var | iLinks, | ||
| Joint * | pjoint | ||
| ) | [static] |
Definition at line 138 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| static void createSensors | ( | ::World * | world, |
| Joint * | jnt, | ||
| SensorInfoSequence | iSensors | ||
| ) | [static] |
Definition at line 82 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| static double getLimitValue | ( | DblSequence_var | limitseq, |
| double | defaultValue | ||
| ) | [inline, static] |
Definition at line 132 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| int loadBodyFromBodyInfo | ( | ::World * | world, |
| const char * | _name, | ||
| BodyInfo_ptr | bodyInfo | ||
| ) |
Definition at line 329 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| int loadBodyFromModelLoader | ( | ::World * | world, |
| const char * | name, | ||
| const char * | url, | ||
| CosNaming::NamingContext_var | cxt | ||
| ) |
Definition at line 384 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| int loadBodyFromModelLoader | ( | ::World * | world, |
| const char * | name, | ||
| const char * | url, | ||
| CORBA_ORB_var | orb | ||
| ) |
Definition at line 430 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| int loadBodyFromModelLoader | ( | ::World * | world, |
| const char * | name, | ||
| const char * | url, | ||
| int | argc, | ||
| char * | argv[] | ||
| ) |
Definition at line 445 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.
| int loadBodyFromModelLoader | ( | ::World * | world, |
| const char * | name, | ||
| const char * | URL, | ||
| istringstream & | strm | ||
| ) |
Definition at line 452 of file server/UtDynamicsSimulator/ModelLoaderUtil.cpp.