Inverse kinematics (UTPoser) class. More...
#include <chain.h>
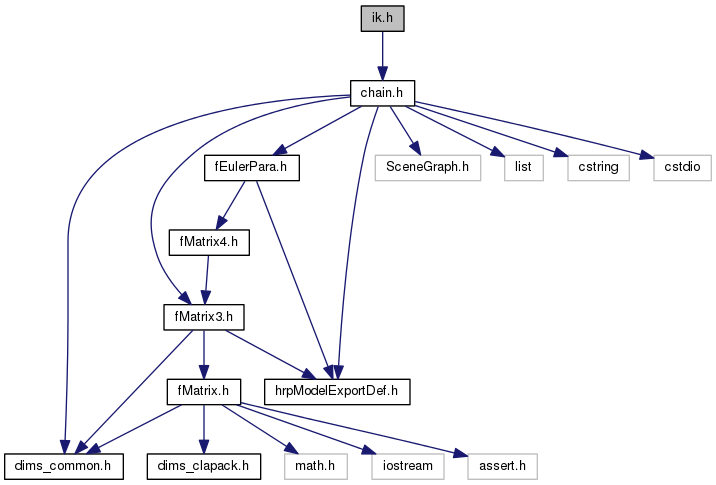
Include dependency graph for ik.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | IK |
| Main class for inverse kinematic computation. More... | |
| class | IKCom |
| Center of mass position. More... | |
| class | IKConstraint |
| Base class for constraints. More... | |
| class | IKDesire |
| Desired joint values. More... | |
| class | IKHandle |
| Position constraint. More... | |
| class | IKScalarJointLimit |
| Joint limit constraint for 1-DOF joints. More... | |
Defines | |
| #define | MAX_CONDITION_NUMBER 100.0 |
| #define | MIN_JOINT_WEIGHT 0.01 |
Variables | |
| static const char | joint_name_separator = '_' |
Detailed Description
Define Documentation
| #define MAX_CONDITION_NUMBER 100.0 |
| #define MIN_JOINT_WEIGHT 0.01 |
Variable Documentation
const char joint_name_separator = '_' [static] |