#include <octomap/octomap.h>#include <sensor_msgs/PointCloud2.h>#include <geometry_msgs/Point.h>#include <tf/transform_datatypes.h>
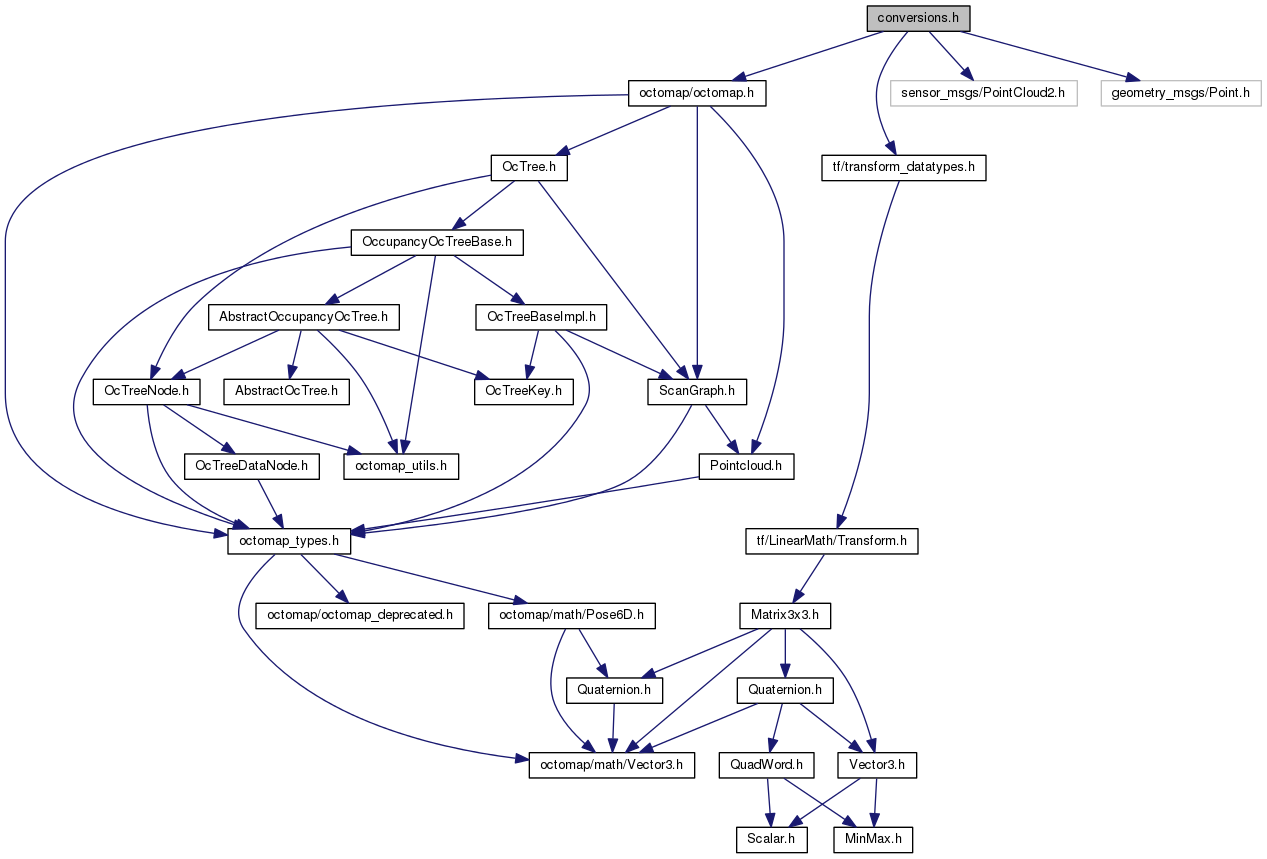
Include dependency graph for conversions.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | octomap |
Functions | |
| void | octomap::pointCloud2ToOctomap (const sensor_msgs::PointCloud2 &cloud, Pointcloud &octomapCloud) |
| Conversion from a sensor_msgs::PointCLoud2 to octomap::Pointcloud, used internally in OctoMap. | |
| static octomap::point3d | octomap::pointMsgToOctomap (const geometry_msgs::Point &ptMsg) |
| Conversion from geometry_msgs::Point to octomap::point3d. | |
| static geometry_msgs::Point | octomap::pointOctomapToMsg (const point3d &octomapPt) |
| Conversion from octomap::point3d to geometry_msgs::Point. | |
| static tf::Point | octomap::pointOctomapToTf (const point3d &octomapPt) |
| Conversion from octomap::point3d to tf::Point. | |
| void | octomap::pointsOctomapToPointCloud2 (const point3d_list &points, sensor_msgs::PointCloud2 &cloud) |
| Conversion from octomap::point3d_list (e.g. all occupied nodes from getOccupied()) to sensor_msgs::PointCloud2. | |
| static octomap::point3d | octomap::pointTfToOctomap (const tf::Point &ptTf) |
| Conversion from tf::Point to octomap::point3d. | |
| static tf::Pose | octomap::poseOctomapToTf (const octomap::pose6d &octomapPose) |
| Conversion from octomap::pose6f to tf::Pose. | |
| static octomap::pose6d | octomap::poseTfToOctomap (const tf::Pose &poseTf) |
| Conversion from tf::Pose to octomap::pose6d. | |
| static tf::Quaternion | octomap::quaternionOctomapToTf (const octomath::Quaternion &octomapQ) |
| Conversion from octomap Quaternion to tf::Quaternion. | |
| static octomath::Quaternion | octomap::quaternionTfToOctomap (const tf::Quaternion &qTf) |
| Conversion from tf::Quaternion to octomap Quaternion. | |