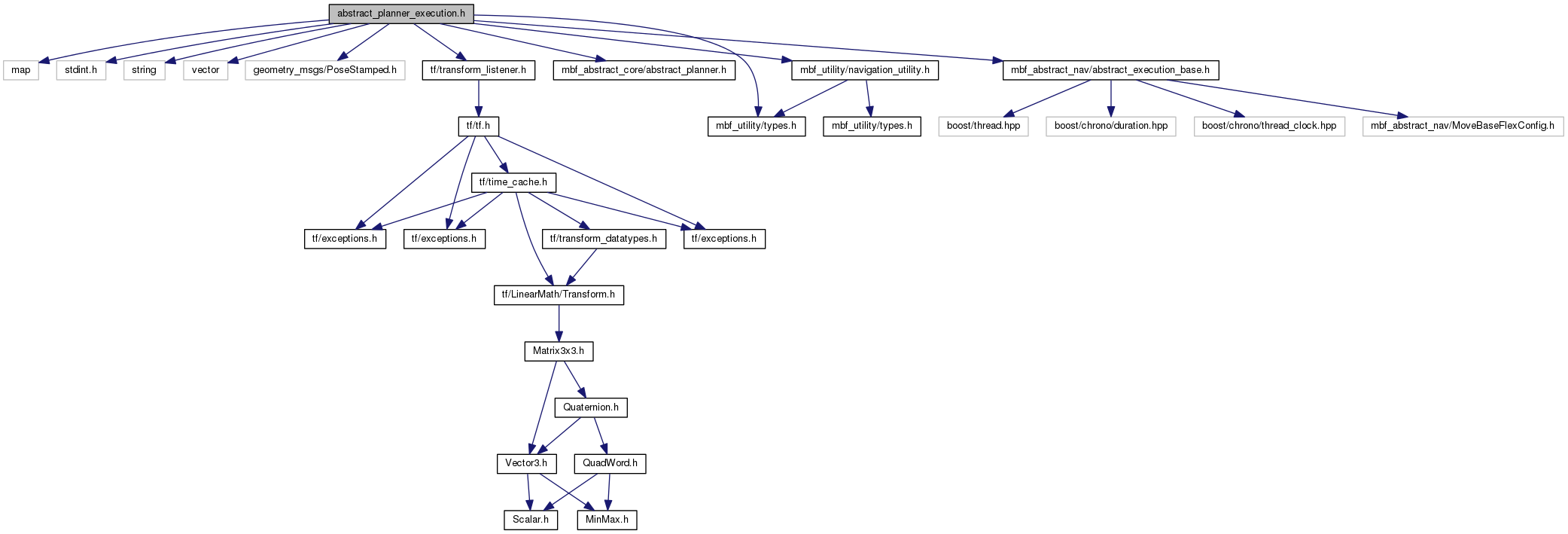
#include <map>#include <stdint.h>#include <string>#include <vector>#include <geometry_msgs/PoseStamped.h>#include <tf/transform_listener.h>#include <mbf_abstract_core/abstract_planner.h>#include <mbf_utility/types.h>#include <mbf_utility/navigation_utility.h>#include "mbf_abstract_nav/abstract_execution_base.h"
Include dependency graph for abstract_planner_execution.h:
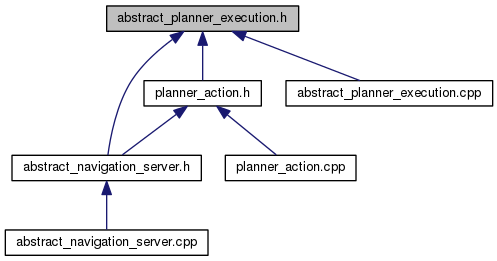
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mbf_abstract_nav::AbstractPlannerExecution |
| The AbstractPlannerExecution class loads and binds the global planner plugin. It contains a thread running the plugin in a cycle to plan and re-plan. An internal state is saved and will be pulled by the server, which controls the global planner execution. Due to a state change it wakes up all threads connected to the condition variable. More... | |
Namespaces | |
| namespace | mbf_abstract_nav |