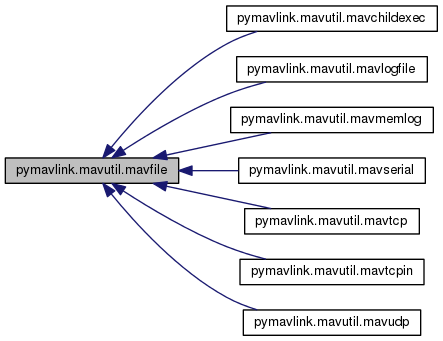
Detailed Description
a generic mavlink port
Definition at line 109 of file mavutil.py.
Constructor & Destructor Documentation
| def pymavlink.mavutil.mavfile.__init__ | ( | self, | |
| fd, | |||
| address, | |||
source_system = 255, |
|||
notimestamps = False, |
|||
input = True, |
|||
use_native = default_native |
|||
| ) |
Definition at line 111 of file mavutil.py.
Member Function Documentation
| def pymavlink.mavutil.mavfile.arducopter_arm | ( | self | ) |
arm motors (arducopter only)
Definition at line 649 of file mavutil.py.
| def pymavlink.mavutil.mavfile.arducopter_disarm | ( | self | ) |
calibrate pressure
Definition at line 665 of file mavutil.py.
| def pymavlink.mavutil.mavfile.auto_mavlink_version | ( | self, | |
| buf | |||
| ) |
auto-switch mavlink protocol version
Definition at line 156 of file mavutil.py.
| def pymavlink.mavutil.mavfile.calibrate_level | ( | self | ) |
calibrate accels (1D version)
Definition at line 593 of file mavutil.py.
| def pymavlink.mavutil.mavfile.calibrate_pressure | ( | self | ) |
calibrate pressure
Definition at line 599 of file mavutil.py.
| def pymavlink.mavutil.mavfile.check_condition | ( | self, | |
| condition | |||
| ) |
check if a condition is true
Definition at line 363 of file mavutil.py.
| def pymavlink.mavutil.mavfile.close | ( | self, | |
n = None |
|||
| ) |
default close method
Definition at line 196 of file mavutil.py.
| def pymavlink.mavutil.mavfile.disable_signing | ( | self | ) |
disable MAVLink2 signing
Definition at line 737 of file mavutil.py.
| def pymavlink.mavutil.mavfile.field | ( | self, | |
| type, | |||
| field, | |||
default = None |
|||
| ) |
convenient function for returning an arbitrary MAVLink field with a default
Definition at line 703 of file mavutil.py.
| def pymavlink.mavutil.mavfile.location | ( | self, | |
relative_alt = False |
|||
| ) |
return current location
Definition at line 634 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mavlink10 | ( | self | ) |
return True if using MAVLink 1.0 or later
Definition at line 367 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mavlink20 | ( | self | ) |
return True if using MAVLink 2.0 or later
Definition at line 371 of file mavutil.py.
| def pymavlink.mavutil.mavfile.mode_mapping | ( | self | ) |
return dictionary mapping mode names to numbers, or None if unknown
Definition at line 493 of file mavutil.py.
| def pymavlink.mavutil.mavfile.motors_armed | ( | self | ) |
return true if motors armed
Definition at line 681 of file mavutil.py.
| def pymavlink.mavutil.mavfile.motors_armed_wait | ( | self | ) |
wait for motors to be armed
Definition at line 688 of file mavutil.py.
| def pymavlink.mavutil.mavfile.motors_disarmed_wait | ( | self | ) |
wait for motors to be disarmed
Definition at line 695 of file mavutil.py.
| def pymavlink.mavutil.mavfile.packet_loss | ( | self | ) |
packet loss as a percentage
Definition at line 297 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param | ( | self, | |
| name, | |||
default = None |
|||
| ) |
convenient function for returning an arbitrary MAVLink parameter with a default
Definition at line 710 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param_fetch_all | ( | self | ) |
initiate fetch of all parameters
Definition at line 387 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param_fetch_one | ( | self, | |
| name | |||
| ) |
initiate fetch of one parameter
Definition at line 396 of file mavutil.py.
| def pymavlink.mavutil.mavfile.param_set_send | ( | self, | |
| parm_name, | |||
| parm_value, | |||
parm_type = None |
|||
| ) |
wrapper for parameter set
Definition at line 410 of file mavutil.py.
| def pymavlink.mavutil.mavfile.post_message | ( | self, | |
| msg | |||
| ) |
default post message call
Reimplemented in pymavlink.mavutil.mavlogfile.
Definition at line 224 of file mavutil.py.
| def pymavlink.mavutil.mavfile.pre_message | ( | self | ) |
default pre message call
Reimplemented in pymavlink.mavutil.mavlogfile.
Definition at line 216 of file mavutil.py.
| def pymavlink.mavutil.mavfile.reboot_autopilot | ( | self, | |
hold_in_bootloader = False |
|||
| ) |
reboot the autopilot
Definition at line 609 of file mavutil.py.
| def pymavlink.mavutil.mavfile.recv | ( | self, | |
n = None |
|||
| ) |
default recv method
Reimplemented in pymavlink.mavutil.mavchildexec, pymavlink.mavutil.mavlogfile, pymavlink.mavutil.mavtcpin, pymavlink.mavutil.mavtcp, pymavlink.mavutil.mavudp, and pymavlink.mavutil.mavserial.
Definition at line 192 of file mavutil.py.
| def pymavlink.mavutil.mavfile.recv_match | ( | self, | |
condition = None, |
|||
type = None, |
|||
blocking = False, |
|||
timeout = None |
|||
| ) |
recv the next MAVLink message that matches the given condition type can be a string or a list of strings
Definition at line 333 of file mavutil.py.
| def pymavlink.mavutil.mavfile.recv_msg | ( | self | ) |
message receive routine
Reimplemented in pymavlink.mavutil.mavmemlog, and pymavlink.mavutil.mavudp.
Definition at line 304 of file mavutil.py.
| def pymavlink.mavutil.mavfile.select | ( | self, | |
| timeout | |||
| ) |
wait for up to timeout seconds for more data
Definition at line 205 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode | ( | self, | |
| mode | |||
| ) |
enter arbitrary mode
Definition at line 516 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_auto | ( | self | ) |
enter auto mode
Definition at line 484 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_fbwa | ( | self | ) |
enter FBWA mode
Definition at line 548 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_flag | ( | self, | |
| flag, | |||
| enable | |||
| ) |
Enables/ disables MAV_MODE_FLAG @param flag The mode flag, see MAV_MODE_FLAG enum @param enable Enable the flag, (True/False)
Definition at line 464 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_loiter | ( | self | ) |
enter LOITER mode
Definition at line 558 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_manual | ( | self | ) |
enter MANUAL mode
Definition at line 537 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_mode_rtl | ( | self | ) |
enter RTL mode
Definition at line 528 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_relay | ( | self, | |
relay_pin = 0, |
|||
state = True |
|||
| ) |
Set relay_pin to value of state
Definition at line 575 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_rtscts | ( | self, | |
| enable | |||
| ) |
enable/disable RTS/CTS if applicable
Reimplemented in pymavlink.mavutil.mavserial.
Definition at line 220 of file mavutil.py.
| def pymavlink.mavutil.mavfile.set_servo | ( | self, | |
| channel, | |||
| pwm | |||
| ) |
set a servo value
Definition at line 567 of file mavutil.py.
| def pymavlink.mavutil.mavfile.setup_logfile | ( | self, | |
| logfile, | |||
mode = 'w' |
|||
| ) |
start logging to the given logfile, with timestamps
Definition at line 375 of file mavutil.py.
| def pymavlink.mavutil.mavfile.setup_logfile_raw | ( | self, | |
| logfile, | |||
mode = 'w' |
|||
| ) |
start logging raw bytes to the given logfile, without timestamps
Definition at line 379 of file mavutil.py.
| def pymavlink.mavutil.mavfile.setup_signing | ( | self, | |
| secret_key, | |||
sign_outgoing = True, |
|||
allow_unsigned_callback = None, |
|||
initial_timestamp = None, |
|||
link_id = None |
|||
| ) |
setup for MAVLink2 signing
Definition at line 717 of file mavutil.py.
| def pymavlink.mavutil.mavfile.time_since | ( | self, | |
| mtype | |||
| ) |
return the time since the last message of type mtype was received
Definition at line 404 of file mavutil.py.
| def pymavlink.mavutil.mavfile.wait_gps_fix | ( | self | ) |
Definition at line 625 of file mavutil.py.
| def pymavlink.mavutil.mavfile.wait_heartbeat | ( | self, | |
blocking = True |
|||
| ) |
wait for a heartbeat so we know the target system IDs
Definition at line 383 of file mavutil.py.
wrapper for waypoint_clear_all_send
Definition at line 428 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_count_send | ( | self, | |
| seq | |||
| ) |
wrapper for waypoint_count_send
Definition at line 457 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_current | ( | self | ) |
return current waypoint
Definition at line 449 of file mavutil.py.
wrapper for waypoint_request_list_send
Definition at line 421 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_request_send | ( | self, | |
| seq | |||
| ) |
wrapper for waypoint_request_send
Definition at line 435 of file mavutil.py.
| def pymavlink.mavutil.mavfile.waypoint_set_current_send | ( | self, | |
| seq | |||
| ) |
wrapper for waypoint_set_current_send
Definition at line 442 of file mavutil.py.
| def pymavlink.mavutil.mavfile.write | ( | self, | |
| buf | |||
| ) |
default write method
Reimplemented in pymavlink.mavutil.mavchildexec, pymavlink.mavutil.mavlogfile, pymavlink.mavutil.mavtcpin, pymavlink.mavutil.mavtcp, pymavlink.mavutil.mavudp, and pymavlink.mavutil.mavserial.
Definition at line 200 of file mavutil.py.
Member Data Documentation
pymavlink::mavutil.mavfile::_timestamp [private] |
Reimplemented in pymavlink.mavutil.mavlogfile.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Reimplemented in pymavlink.mavutil.mavchildexec, pymavlink.mavutil.mavtcpin, and pymavlink.mavutil.mavserial.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Reimplemented in pymavlink.mavutil.mavmemlog.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 387 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Reimplemented in pymavlink.mavutil.mavserial.
Definition at line 111 of file mavutil.py.
Reimplemented in pymavlink.mavutil.mavlogfile.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Reimplemented in pymavlink.mavutil.mavlogfile.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Reimplemented in pymavlink.mavutil.mavlogfile.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
Definition at line 111 of file mavutil.py.
The documentation for this class was generated from the following file: