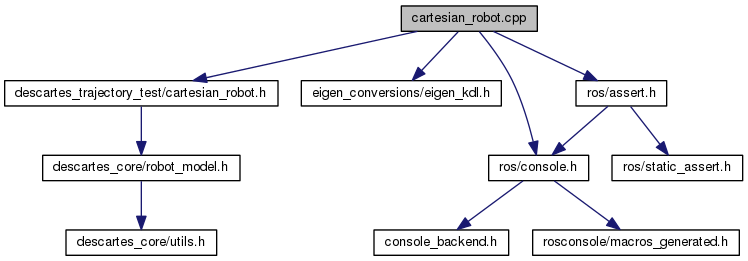
#include "descartes_trajectory_test/cartesian_robot.h"#include "descartes_core/pretty_print.hpp"#include "eigen_conversions/eigen_kdl.h"#include "ros/console.h"#include "ros/assert.h"
Include dependency graph for cartesian_robot.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | descartes_trajectory_test |
: This file contains inerface test for the Descartes RobotModel. These tests can be executed on arbitrary types that inplment the RobotModel interface. For more info see: GTest Advanced Guide - Type-Parameterized Tests | |
Functions | |
| static void | descartes_trajectory_test::displayRange (double pos_range, double orient_range) |
Variables | |
| static const int | descartes_trajectory_test::DOF = 6 |