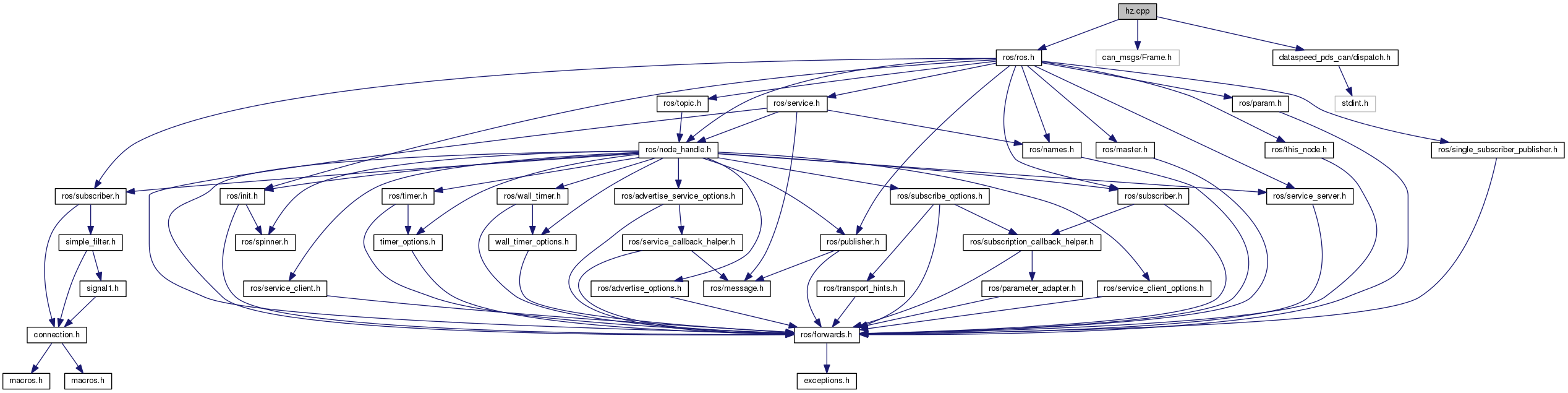
Include dependency graph for hz.cpp:
Go to the source code of this file.
Functions | |
| can_msgs::Frame | buildMsg (int unit_id, uint32_t can_id) |
| int | main (int argc, char **argv) |
| void | timerCallback (const ros::TimerEvent &, int id) |
Variables | |
| ros::Publisher | g_pub |
Function Documentation
| void timerCallback | ( | const ros::TimerEvent & | , |
| int | id | ||
| ) |