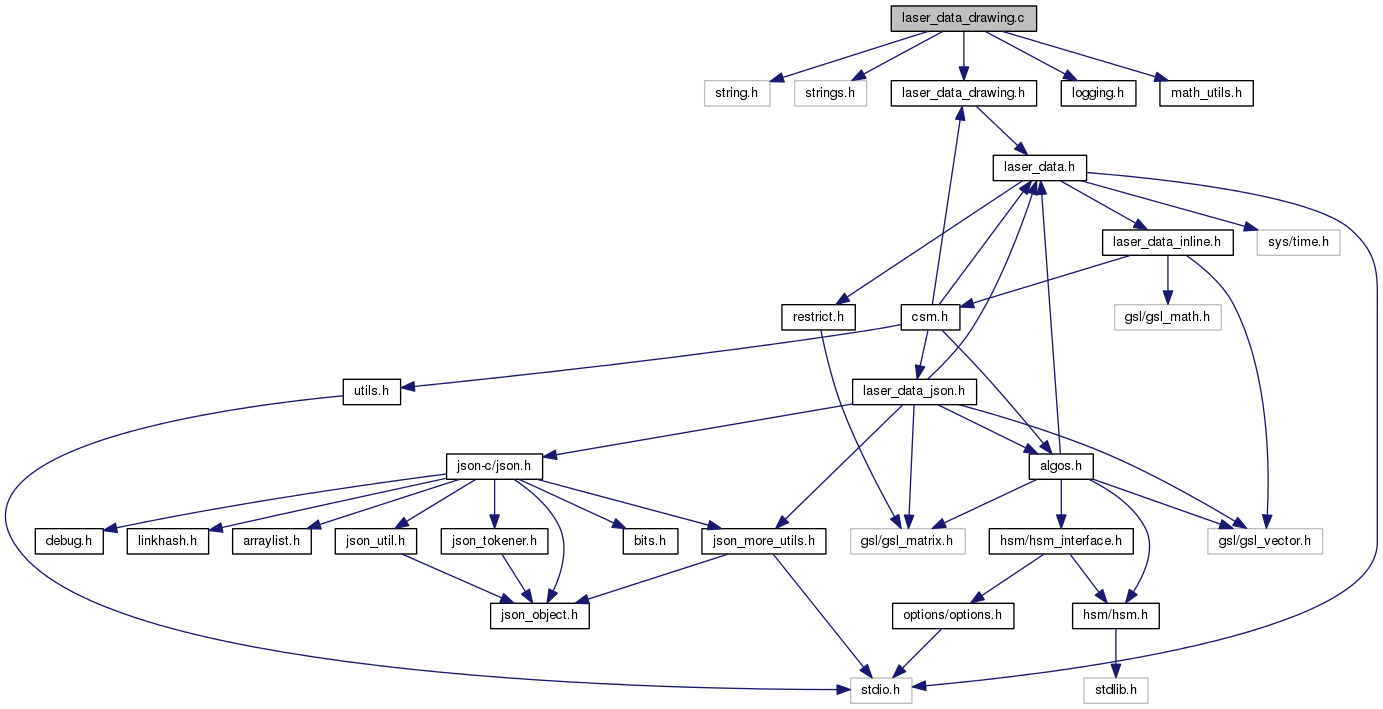
#include <string.h>#include <strings.h>#include "laser_data_drawing.h"#include "logging.h"#include "math_utils.h"
Include dependency graph for laser_data_drawing.c:
Go to the source code of this file.
Functions | |
| void | compute_stroke_sequence (LDP ld, struct stroke_sequence *draw_info, double horizon, double connect_threshold) |
| int | ld_get_bounding_box (LDP ld, double bb_min[2], double bb_max[2], double pose[3], double horizon) |
| double * | ld_get_reference_pose (LDP ld, ld_reference use_reference) |
| double * | ld_get_reference_pose_silent (LDP ld, ld_reference use_reference) |
| const char * | ld_reference_to_string (ld_reference r) |
| ld_reference | ld_string_to_reference (const char *s) |
| void | lda_get_bounding_box (LDP *lda, int nld, double bb_min[2], double bb_max[2], double offset[3], ld_reference use_reference, double horizon) |
Variables | |
| const char * | ld_reference_name [4] = { "invalid","odometry","estimate","true_pose"} |
Function Documentation
| void compute_stroke_sequence | ( | LDP | ld, |
| struct stroke_sequence * | draw_info, | ||
| double | horizon, | ||
| double | connect_threshold | ||
| ) |
Definition at line 114 of file laser_data_drawing.c.
| int ld_get_bounding_box | ( | LDP | ld, |
| double | bb_min[2], | ||
| double | bb_max[2], | ||
| double | pose[3], | ||
| double | horizon | ||
| ) |
Returns != 0 if enough points were found
Definition at line 22 of file laser_data_drawing.c.
| double* ld_get_reference_pose | ( | LDP | ld, |
| ld_reference | use_reference | ||
| ) |
Same as ld_get_reference_pose_silent(), but it also checks that the pose is valid (no NANs inside).
Definition at line 103 of file laser_data_drawing.c.
| double* ld_get_reference_pose_silent | ( | LDP | ld, |
| ld_reference | use_reference | ||
| ) |
Gets a pointer to the pose specified by 'use_reference', or 0 if use_reference is invalid.
Definition at line 90 of file laser_data_drawing.c.
| const char* ld_reference_to_string | ( | ld_reference | r | ) |
Definition at line 9 of file laser_data_drawing.c.
| ld_reference ld_string_to_reference | ( | const char * | s | ) |
Definition at line 13 of file laser_data_drawing.c.
| void lda_get_bounding_box | ( | LDP * | lda, |
| int | nld, | ||
| double | bb_min[2], | ||
| double | bb_max[2], | ||
| double | offset[3], | ||
| ld_reference | use_reference, | ||
| double | horizon | ||
| ) |
Definition at line 60 of file laser_data_drawing.c.
Variable Documentation
| const char* ld_reference_name[4] = { "invalid","odometry","estimate","true_pose"} |
Definition at line 7 of file laser_data_drawing.c.